#include <gtest/gtest.h>#include <iostream>#include "Fixtures.h"#include "Human36Fixture.h"#include "rdl_dynamics/rdl_mathutils.h"#include "rdl_dynamics/Model.h"#include "rdl_dynamics/Kinematics.h"#include "rdl_dynamics/Dynamics.h"#include "rdl_dynamics/Contacts.h"#include "rdl_dynamics/rdl_utils.h"#include <vector>#include "UnitTestUtils.hpp"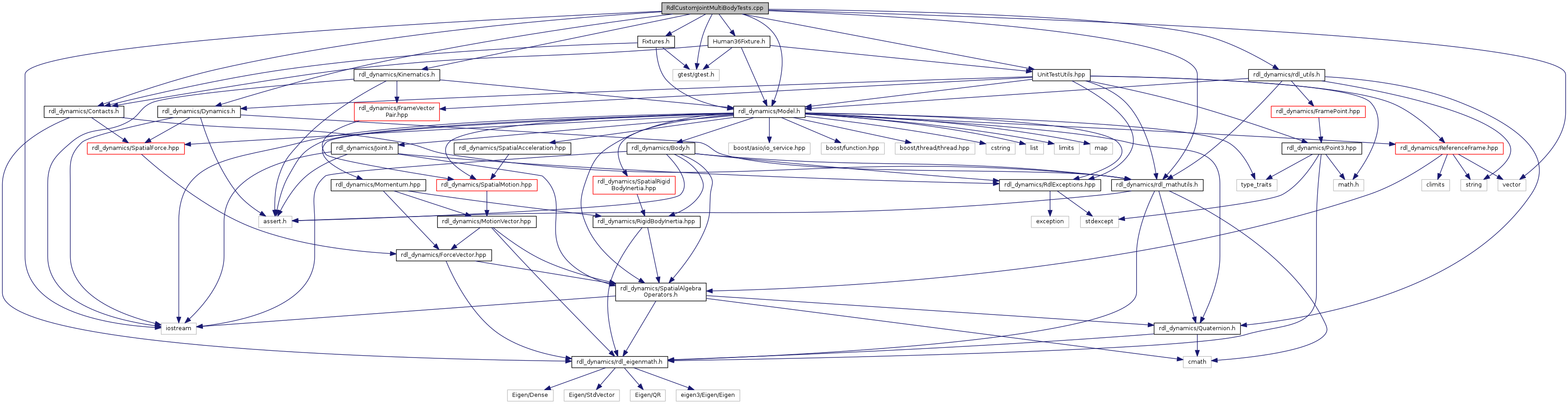
Go to the source code of this file.
Classes | |
| struct | CustomEulerZYXJoint |
| struct | CustomJointTypeRevoluteX |
| struct | RdlCustomJointMultiBodyFixture |
Functions | |
| int | main (int argc, char **argv) |
| TEST_F (RdlCustomJointMultiBodyFixture, UpdateKinematics) | |
| TEST_F (RdlCustomJointMultiBodyFixture, updateKinematicsCustom) | |
| TEST_F (RdlCustomJointMultiBodyFixture, Jacobians) | |
| TEST_F (RdlCustomJointMultiBodyFixture, calcCentroidalMomentumMatrixDot) | |
| TEST_F (RdlCustomJointMultiBodyFixture, GravityEffects) | |
| TEST_F (RdlCustomJointMultiBodyFixture, InverseDynamics) | |
| TEST_F (RdlCustomJointMultiBodyFixture, CompositeRigidBodyAlgorithm) | |
| TEST_F (RdlCustomJointMultiBodyFixture, ForwardDynamics) | |
| TEST_F (RdlCustomJointMultiBodyFixture, CalcMInvTimestau) | |
| TEST_F (RdlCustomJointMultiBodyFixture, ForwardDynamicsContactsKokkevis) | |
Variables | |
| const int | NUMBER_OF_BODIES = 3 |
| const int | NUMBER_OF_MODELS = 3 |
| const double | TEST_PREC = 1.0e-11 |
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 952 of file RdlCustomJointMultiBodyTests.cpp.
| TEST_F | ( | RdlCustomJointMultiBodyFixture | , |
| UpdateKinematics | |||
| ) |
Definition at line 413 of file RdlCustomJointMultiBodyTests.cpp.
| TEST_F | ( | RdlCustomJointMultiBodyFixture | , |
| updateKinematicsCustom | |||
| ) |
Definition at line 443 of file RdlCustomJointMultiBodyTests.cpp.
| TEST_F | ( | RdlCustomJointMultiBodyFixture | , |
| Jacobians | |||
| ) |
Definition at line 481 of file RdlCustomJointMultiBodyTests.cpp.
| TEST_F | ( | RdlCustomJointMultiBodyFixture | , |
| calcCentroidalMomentumMatrixDot | |||
| ) |
Definition at line 724 of file RdlCustomJointMultiBodyTests.cpp.
| TEST_F | ( | RdlCustomJointMultiBodyFixture | , |
| GravityEffects | |||
| ) |
Definition at line 748 of file RdlCustomJointMultiBodyTests.cpp.
| TEST_F | ( | RdlCustomJointMultiBodyFixture | , |
| InverseDynamics | |||
| ) |
Definition at line 776 of file RdlCustomJointMultiBodyTests.cpp.
| TEST_F | ( | RdlCustomJointMultiBodyFixture | , |
| CompositeRigidBodyAlgorithm | |||
| ) |
Definition at line 802 of file RdlCustomJointMultiBodyTests.cpp.
| TEST_F | ( | RdlCustomJointMultiBodyFixture | , |
| ForwardDynamics | |||
| ) |
Definition at line 844 of file RdlCustomJointMultiBodyTests.cpp.
| TEST_F | ( | RdlCustomJointMultiBodyFixture | , |
| CalcMInvTimestau | |||
| ) |
Definition at line 868 of file RdlCustomJointMultiBodyTests.cpp.
| TEST_F | ( | RdlCustomJointMultiBodyFixture | , |
| ForwardDynamicsContactsKokkevis | |||
| ) |
Definition at line 894 of file RdlCustomJointMultiBodyTests.cpp.
Variable Documentation
| const int NUMBER_OF_BODIES = 3 |
Definition at line 28 of file RdlCustomJointMultiBodyTests.cpp.
| const int NUMBER_OF_MODELS = 3 |
Definition at line 27 of file RdlCustomJointMultiBodyTests.cpp.
| const double TEST_PREC = 1.0e-11 |
Definition at line 26 of file RdlCustomJointMultiBodyTests.cpp.