#include <online_walking_module.h>
Definition at line 81 of file online_walking_module.h.
| OnlineWalkingModule::OnlineWalkingModule |
( |
| ) |
|
| OnlineWalkingModule::~OnlineWalkingModule |
( |
| ) |
|
|
virtual |
| void OnlineWalkingModule::calcBalanceControl |
( |
| ) |
|
|
private |
| void OnlineWalkingModule::calcJointControl |
( |
| ) |
|
|
private |
| void OnlineWalkingModule::calcOffsetControl |
( |
| ) |
|
|
private |
| void OnlineWalkingModule::calcRobotPose |
( |
| ) |
|
|
private |
| void OnlineWalkingModule::calcWalkingControl |
( |
| ) |
|
|
private |
| void OnlineWalkingModule::calcWholebodyControl |
( |
| ) |
|
|
private |
| bool OnlineWalkingModule::definePreviewMatrix |
( |
| ) |
|
| void OnlineWalkingModule::footStep2DCallback |
( |
const op3_online_walking_module_msgs::Step2DArray & |
msg | ) |
|
| void OnlineWalkingModule::footStepCommandCallback |
( |
const op3_online_walking_module_msgs::FootStepCommand & |
msg | ) |
|
| bool OnlineWalkingModule::getJointPoseCallback |
( |
op3_online_walking_module_msgs::GetJointPose::Request & |
req, |
|
|
op3_online_walking_module_msgs::GetJointPose::Response & |
res |
|
) |
| |
| bool OnlineWalkingModule::getKinematicsPoseCallback |
( |
op3_online_walking_module_msgs::GetKinematicsPose::Request & |
req, |
|
|
op3_online_walking_module_msgs::GetKinematicsPose::Response & |
res |
|
) |
| |
| bool robotis_op::OnlineWalkingModule::getPreviewMatrix |
( |
op3_online_walking_module_msgs::PreviewRequest |
msg | ) |
|
| void OnlineWalkingModule::goalJointPoseCallback |
( |
const op3_online_walking_module_msgs::JointPose & |
msg | ) |
|
| void OnlineWalkingModule::goalKinematicsPoseCallback |
( |
const op3_online_walking_module_msgs::KinematicsPose & |
msg | ) |
|
| void OnlineWalkingModule::imuDataCallback |
( |
const sensor_msgs::Imu::ConstPtr & |
msg | ) |
|
| void OnlineWalkingModule::initBalanceControl |
( |
| ) |
|
|
private |
| void OnlineWalkingModule::initFeedforwardControl |
( |
| ) |
|
|
private |
| void OnlineWalkingModule::initJointControl |
( |
| ) |
|
|
private |
| void OnlineWalkingModule::initOffsetControl |
( |
| ) |
|
|
private |
| void OnlineWalkingModule::initWalkingControl |
( |
| ) |
|
|
private |
| void OnlineWalkingModule::initWholebodyControl |
( |
| ) |
|
|
private |
| bool OnlineWalkingModule::isRunning |
( |
| ) |
|
|
virtual |
| void OnlineWalkingModule::leftFootForceTorqueOutputCallback |
( |
const geometry_msgs::WrenchStamped::ConstPtr & |
msg | ) |
|
| void OnlineWalkingModule::parseBalanceGainData |
( |
const std::string & |
path | ) |
|
| void OnlineWalkingModule::parseJointFeedbackGainData |
( |
const std::string & |
path | ) |
|
| void OnlineWalkingModule::parseJointFeedforwardGainData |
( |
const std::string & |
path | ) |
|
| void OnlineWalkingModule::publishStatusMsg |
( |
unsigned int |
type, |
|
|
std::string |
msg |
|
) |
| |
| void OnlineWalkingModule::queueThread |
( |
| ) |
|
|
private |
| void OnlineWalkingModule::resetBodyPose |
( |
| ) |
|
|
private |
| void OnlineWalkingModule::rightFootForceTorqueOutputCallback |
( |
const geometry_msgs::WrenchStamped::ConstPtr & |
msg | ) |
|
| void OnlineWalkingModule::sensoryFeedback |
( |
const double & |
rlGyroErr, |
|
|
const double & |
fbGyroErr, |
|
|
double * |
balance_angle |
|
) |
| |
|
private |
| bool OnlineWalkingModule::setBalanceControl |
( |
| ) |
|
|
private |
| void OnlineWalkingModule::setBalanceControlGain |
( |
| ) |
|
|
private |
| void OnlineWalkingModule::setBodyOffsetCallback |
( |
const geometry_msgs::Pose::ConstPtr & |
msg | ) |
|
| void OnlineWalkingModule::setFeedbackControl |
( |
| ) |
|
|
private |
| void OnlineWalkingModule::setFeedforwardControl |
( |
| ) |
|
|
private |
| void OnlineWalkingModule::setFootDistanceCallback |
( |
const std_msgs::Float64::ConstPtr & |
msg | ) |
|
| void OnlineWalkingModule::setResetBodyCallback |
( |
const std_msgs::Bool::ConstPtr & |
msg | ) |
|
| void OnlineWalkingModule::setTargetForceTorque |
( |
| ) |
|
|
private |
| void OnlineWalkingModule::setWholebodyBalanceMsgCallback |
( |
const std_msgs::String::ConstPtr & |
msg | ) |
|
| void OnlineWalkingModule::stop |
( |
| ) |
|
|
virtual |
| void OnlineWalkingModule::walkingParamCallback |
( |
const op3_online_walking_module_msgs::WalkingParam & |
msg | ) |
|
| double robotis_op::OnlineWalkingModule::balance_ankle_pitch_gain_ |
|
private |
| double robotis_op::OnlineWalkingModule::balance_ankle_roll_gain_ |
|
private |
| bool robotis_op::OnlineWalkingModule::balance_control_initialize_ |
|
private |
| double robotis_op::OnlineWalkingModule::balance_hip_roll_gain_ |
|
private |
| double robotis_op::OnlineWalkingModule::balance_knee_gain_ |
|
private |
| double robotis_op::OnlineWalkingModule::balance_l_foot_force_x_ |
|
private |
| double robotis_op::OnlineWalkingModule::balance_l_foot_force_y_ |
|
private |
| double robotis_op::OnlineWalkingModule::balance_l_foot_force_z_ |
|
private |
| double robotis_op::OnlineWalkingModule::balance_l_foot_torque_x_ |
|
private |
| double robotis_op::OnlineWalkingModule::balance_l_foot_torque_y_ |
|
private |
| double robotis_op::OnlineWalkingModule::balance_l_foot_torque_z_ |
|
private |
| double robotis_op::OnlineWalkingModule::balance_r_foot_force_x_ |
|
private |
| double robotis_op::OnlineWalkingModule::balance_r_foot_force_y_ |
|
private |
| double robotis_op::OnlineWalkingModule::balance_r_foot_force_z_ |
|
private |
| double robotis_op::OnlineWalkingModule::balance_r_foot_torque_x_ |
|
private |
| double robotis_op::OnlineWalkingModule::balance_r_foot_torque_y_ |
|
private |
| double robotis_op::OnlineWalkingModule::balance_r_foot_torque_z_ |
|
private |
| int robotis_op::OnlineWalkingModule::balance_size_ |
|
private |
| int robotis_op::OnlineWalkingModule::balance_step_ |
|
private |
| bool robotis_op::OnlineWalkingModule::body_offset_initialize_ |
|
private |
| int robotis_op::OnlineWalkingModule::body_offset_size_ |
|
private |
| int robotis_op::OnlineWalkingModule::body_offset_step_ |
|
private |
| double robotis_op::OnlineWalkingModule::control_cycle_sec_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::curr_joint_accel_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::curr_joint_pos_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::curr_joint_vel_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_balance_gain_ratio_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_body_accel_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_body_offset_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_body_pos_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_body_Q_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_body_vel_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_joint_accel_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_joint_feedback_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_joint_feedforward_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_joint_pos_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_joint_pos_to_robot_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_joint_vel_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_l_arm_accel_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_l_arm_pos_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_l_arm_Q_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_l_arm_vel_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_l_leg_accel_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_l_leg_pos_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_l_leg_Q_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_l_leg_vel_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_r_arm_accel_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_r_arm_pos_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_r_arm_Q_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_r_arm_vel_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_r_leg_accel_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_r_leg_pos_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_r_leg_Q_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::des_r_leg_vel_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_distance_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_pitch_angle_d_gain_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_pitch_angle_p_gain_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_pitch_gyro_d_gain_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_pitch_gyro_p_gain_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_pitch_torque_cut_off_frequency_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_pitch_torque_d_gain_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_pitch_torque_p_gain_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_roll_angle_d_gain_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_roll_angle_p_gain_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_roll_gyro_d_gain_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_roll_gyro_p_gain_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_roll_torque_cut_off_frequency_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_roll_torque_d_gain_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_roll_torque_p_gain_ |
|
private |
| op3_online_walking_module_msgs::Step2DArray robotis_op::OnlineWalkingModule::foot_step_2d_ |
|
private |
| op3_online_walking_module_msgs::FootStepCommand robotis_op::OnlineWalkingModule::foot_step_command_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_x_force_cut_off_frequency_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_x_force_d_gain_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_x_force_p_gain_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_y_force_cut_off_frequency_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_y_force_d_gain_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_y_force_p_gain_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_z_force_cut_off_frequency_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_z_force_d_gain_ |
|
private |
| double robotis_op::OnlineWalkingModule::foot_z_force_p_gain_ |
|
private |
| Eigen::MatrixXd robotis_op::OnlineWalkingModule::g_to_l_leg_ |
|
private |
| Eigen::MatrixXd robotis_op::OnlineWalkingModule::g_to_r_leg_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::goal_balance_gain_ratio_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::goal_body_offset_ |
|
private |
| bool robotis_op::OnlineWalkingModule::goal_initialize_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::goal_joint_accel_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::goal_joint_pos_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::goal_joint_vel_ |
|
private |
| sensor_msgs::Imu robotis_op::OnlineWalkingModule::imu_data_msg_ |
|
private |
| boost::mutex robotis_op::OnlineWalkingModule::imu_data_mutex_lock_ |
|
private |
| bool robotis_op::OnlineWalkingModule::is_balancing_ |
|
private |
| bool robotis_op::OnlineWalkingModule::is_foot_step_2d_ |
|
private |
| bool robotis_op::OnlineWalkingModule::is_moving_ |
|
private |
| bool robotis_op::OnlineWalkingModule::is_offset_updating_ |
|
private |
| bool robotis_op::OnlineWalkingModule::joint_control_initialize_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::joint_feedforward_gain_ |
|
private |
| std::vector<std::string> robotis_op::OnlineWalkingModule::joint_name_ |
|
private |
| std::map<std::string, int> robotis_op::OnlineWalkingModule::joint_name_to_id_ |
|
private |
| geometry_msgs::Wrench robotis_op::OnlineWalkingModule::l_foot_ft_data_msg_ |
|
private |
| int robotis_op::OnlineWalkingModule::mov_size_ |
|
private |
| int robotis_op::OnlineWalkingModule::mov_step_ |
|
private |
| double robotis_op::OnlineWalkingModule::mov_time_ |
|
private |
| std_msgs::String robotis_op::OnlineWalkingModule::movement_done_msg_ |
|
private |
| size_t robotis_op::OnlineWalkingModule::number_of_joints_ |
|
private |
| double robotis_op::OnlineWalkingModule::pitch_angle_cut_off_frequency_ |
|
private |
| double robotis_op::OnlineWalkingModule::pitch_gyro_cut_off_frequency_ |
|
private |
| op3_online_walking_module_msgs::PreviewRequest robotis_op::OnlineWalkingModule::preview_request_ |
|
private |
| op3_online_walking_module_msgs::PreviewResponse robotis_op::OnlineWalkingModule::preview_response_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::preview_response_K_ |
|
private |
| int robotis_op::OnlineWalkingModule::preview_response_K_col_ |
|
private |
| int robotis_op::OnlineWalkingModule::preview_response_K_row_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::preview_response_P_ |
|
private |
| int robotis_op::OnlineWalkingModule::preview_response_P_col_ |
|
private |
| int robotis_op::OnlineWalkingModule::preview_response_P_row_ |
|
private |
| boost::mutex robotis_op::OnlineWalkingModule::queue_mutex_ |
|
private |
| boost::thread robotis_op::OnlineWalkingModule::queue_thread_ |
|
private |
| geometry_msgs::Wrench robotis_op::OnlineWalkingModule::r_foot_ft_data_msg_ |
|
private |
| double robotis_op::OnlineWalkingModule::roll_angle_cut_off_frequency_ |
|
private |
| double robotis_op::OnlineWalkingModule::roll_gyro_cut_off_frequency_ |
|
private |
| double robotis_op::OnlineWalkingModule::total_mass_ |
|
private |
| bool robotis_op::OnlineWalkingModule::walking_initialize_ |
|
private |
| int robotis_op::OnlineWalkingModule::walking_leg_ |
|
private |
| op3_online_walking_module_msgs::WalkingParam robotis_op::OnlineWalkingModule::walking_param_ |
|
private |
| int robotis_op::OnlineWalkingModule::walking_phase_ |
|
private |
| int robotis_op::OnlineWalkingModule::walking_size_ |
|
private |
| int robotis_op::OnlineWalkingModule::walking_step_ |
|
private |
| geometry_msgs::Pose robotis_op::OnlineWalkingModule::wholebody_goal_msg_ |
|
private |
| bool robotis_op::OnlineWalkingModule::wholebody_initialize_ |
|
private |
| std::string robotis_op::OnlineWalkingModule::wholegbody_control_group_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::x_lipm_ |
|
private |
| std::vector<double_t> robotis_op::OnlineWalkingModule::y_lipm_ |
|
private |
The documentation for this class was generated from the following files:
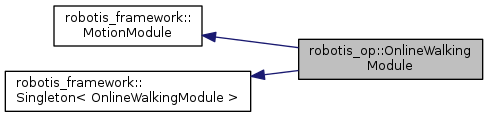
 Public Member Functions inherited from robotis_framework::MotionModule
Public Member Functions inherited from robotis_framework::MotionModule