#include "mrpt_graphslam_2d/CGraphSlamEngine_MR.h"#include "mrpt_graphslam_2d/interfaces/CRegistrationDeciderOrOptimizer_ROS.h"#include "mrpt_graphslam_2d/CConnectionManager.h"#include "mrpt_graphslam_2d/interfaces/CRegistrationDeciderOrOptimizer_MR_impl.h"
Include dependency graph for CRegistrationDeciderOrOptimizer_MR.h:

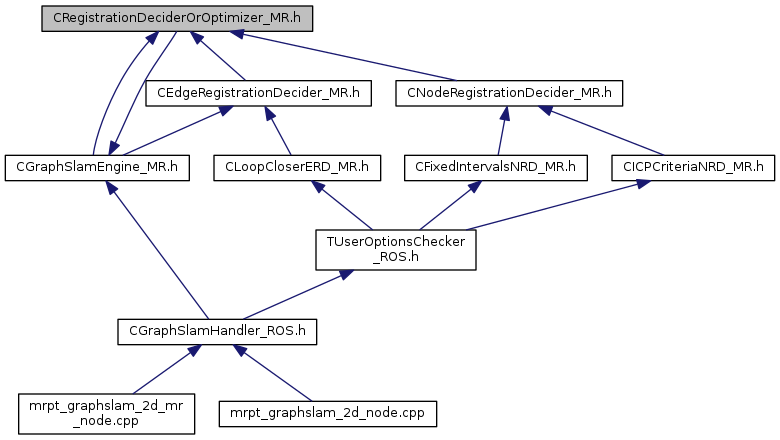
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::graphslam::CGraphSlamEngine_MR< GRAPH_T > |
| mrpt::graphslam::CGraphSlamEngine derived class for executing multi-robot graphSLAM More... | |
| class | mrpt::graphslam::CRegistrationDeciderOrOptimizer_MR< GRAPH_T > |
| Interface for implementing deciders/optimizers related to the Condensed Measurements multi-robot graphSLAM algorithm. More... | |
Namespaces | |
| mrpt | |
| mrpt::graphslam | |