|
| bool | _execGraphSlamStep (mrpt::obs::CActionCollection::Ptr &action, mrpt::obs::CSensoryFrame::Ptr &observations, mrpt::obs::CObservation::Ptr &observation, size_t &rawlog_entry) |
| |
| | CGraphSlamEngine_MR (ros::NodeHandle *nh, const std::string &config_file, const std::string &rawlog_fname="", const std::string &fname_GT="", mrpt::graphslam::CWindowManager *win_manager=NULL, mrpt::graphslam::deciders::CNodeRegistrationDecider< GRAPH_T > *node_reg=NULL, mrpt::graphslam::deciders::CEdgeRegistrationDecider< GRAPH_T > *edge_reg=NULL, mrpt::graphslam::optimizers::CGraphSlamOptimizer< GRAPH_T > *optimizer=NULL) |
| |
| const neighbors_t & | getVecOfNeighborAgentProps () const |
| |
| void | initClass () |
| |
| bool | isOwnNodeID (const TNodeID nodeID, const global_pose_t *pose_out=NULL) const |
| | Return true if current CGraphSlamEngine_MR object initially registered this nodeID, false otherwise. More...
|
| |
| | ~CGraphSlamEngine_MR () |
| |
| | CGraphSlamEngine_ROS (ros::NodeHandle *nh, const std::string &config_file, const std::string &rawlog_fname="", const std::string &fname_GT="", mrpt::graphslam::CWindowManager *win_manager=NULL, mrpt::graphslam::deciders::CNodeRegistrationDecider< GRAPH_T > *node_reg=NULL, mrpt::graphslam::deciders::CEdgeRegistrationDecider< GRAPH_T > *edge_reg=NULL, mrpt::graphslam::optimizers::CGraphSlamOptimizer< GRAPH_T > *optimizer=NULL) |
| |
| void | initClass () |
| | Initialize object instance. More...
|
| |
| void | setupComm () |
| | Wrapper method around the protected setup* class methods. More...
|
| |
| virtual | ~CGraphSlamEngine_ROS () |
| |
| virtual bool | _execGraphSlamStep (mrpt::obs::CActionCollectionPtr &action, mrpt::obs::CSensoryFramePtr &observations, mrpt::obs::CObservationPtr &observation, size_t &rawlog_entry) |
| |
| | CGraphSlamEngine (const std::string &config_file, const std::string &rawlog_fname="", const std::string &fname_GT="", mrpt::graphslam::CWindowManager *win_manager=NULL, mrpt::graphslam::deciders::CNodeRegistrationDecider< GRAPH_T > *node_reg=NULL, mrpt::graphslam::deciders::CEdgeRegistrationDecider< GRAPH_T > *edge_reg=NULL, mrpt::graphslam::optimizers::CGraphSlamOptimizer< GRAPH_T > *optimizer=NULL) |
| |
| void | computeMap () const |
| |
| void | computeMap () const |
| |
| bool | execGraphSlamStep (mrpt::obs::CObservationPtr &observation, size_t &rawlog_entry) |
| |
| void | generateReportFiles (const std::string &output_dir_fname_in) |
| |
| global_pose_t | getCurrentRobotPosEstimation () const |
| |
| void | getDeformationEnergyVector (std::vector< double > *vec_out) const |
| |
| const GRAPH_T & | getGraph () const |
| |
| bool | getGraphSlamStats (std::map< std::string, int > *node_stats, std::map< std::string, int > *edge_stats, mrpt::system::TTimeStamp *timestamp=NULL) |
| |
| void | getMap (mrpt::maps::COccupancyGridMap2DPtr map, mrpt::system::TTimeStamp *acquisition_time=NULL) const |
| |
| void | getMap (mrpt::maps::COctoMapPtr map, mrpt::system::TTimeStamp *acquisition_time=NULL) const |
| |
| void | getMap (mrpt::maps::COccupancyGridMap2DPtr map, mrpt::system::TTimeStamp *acquisition_time=NULL) const |
| |
| void | getMap (mrpt::maps::COctoMapPtr map, mrpt::system::TTimeStamp *acquisition_time=NULL) const |
| |
| virtual void | getNodeIDsOfEstimatedTrajectory (std::set< mrpt::utils::TNodeID > *nodes_set) const |
| |
| void | getParamsAsString (std::string *params_out) const |
| |
| std::string | getParamsAsString () const |
| |
| std::string | getRawlogFname () |
| |
| bool | isPaused () const |
| |
| bool | isPaused () const |
| |
| void | loadParams (const std::string &fname) |
| |
| void | pauseExec () |
| |
| void | pauseExec () |
| |
| void | printParams () const |
| |
| void | resumeExec () const |
| |
| void | resumeExec () const |
| |
| void | save3DScene (const std::string *fname_in=NULL) const |
| |
| void | saveGraph (const std::string *fname_in=NULL) const |
| |
| void | togglePause () |
| |
| void | togglePause () |
| |
| virtual | ~CGraphSlamEngine () |
| |
|
| static void | readGTFile (const std::string &fname_GT, std::vector< mrpt::poses::CPose2D > *gt_poses, std::vector< mrpt::system::TTimeStamp > *gt_timestamps=NULL) |
| |
| static void | readGTFile (const std::string &fname_GT, std::vector< mrpt::poses::CPose3D > *gt_poses, std::vector< mrpt::system::TTimeStamp > *gt_timestamps=NULL) |
| |
| static void | readGTFile (const std::string &fname_GT, std::vector< mrpt::poses::CPose3D > *gt_poses, std::vector< mrpt::system::TTimeStamp > *gt_timestamps=NULL) |
| |
| static void | readGTFile (const std::string &fname_GT, std::vector< mrpt::poses::CPose2D > *gt_poses, std::vector< mrpt::system::TTimeStamp > *gt_timestamps=NULL) |
| |
| static void | readGTFileRGBD_TUM (const std::string &fname_GT, std::vector< mrpt::poses::CPose2D > *gt_poses, std::vector< mrpt::system::TTimeStamp > *gt_timestamps=NULL) |
| |
| static void | readGTFileRGBD_TUM (const std::string &fname_GT, std::vector< mrpt::poses::CPose2D > *gt_poses, std::vector< mrpt::system::TTimeStamp > *gt_timestamps=NULL) |
| |
| ros::NodeHandle * | m_nh |
| |
| void | readParams () |
| | Read the problem configuration parameters. More...
|
| |
| void | readROSParameters () |
| | Read configuration parameters from the ROS parameter server. More...
|
| |
| void | alignOpticalWithMRPTFrame () |
| |
| void | computeSlamMetric (mrpt::utils::TNodeID nodeID, size_t gt_index) |
| |
| void | decimateLaserScan (mrpt::obs::CObservation2DRangeScan &laser_scan_in, mrpt::obs::CObservation2DRangeScan *laser_scan_out, const int keep_every_n_entries=2) |
| |
| void | dumpVisibilityErrorMsg (std::string viz_flag, int sleep_time=500) |
| |
| void | execDijkstraNodesEstimation () |
| |
| void | getDescriptiveReport (std::string *report_str) const |
| |
| void | initClass () |
| |
| void | initCurrPosViewport () |
| |
| void | initEstimatedTrajectoryVisualization () |
| |
| void | initGTVisualization () |
| |
| void | initIntensityImageViewport () |
| |
| void | initIntensityImageViewport () |
| |
| void | initMapVisualization () |
| |
| void | initMapVisualization () |
| |
| void | initOdometryVisualization () |
| |
| void | initRangeImageViewport () |
| |
| void | initRangeImageViewport () |
| |
| void | initResultsFile (const std::string &fname) |
| |
| mrpt::opengl::CSetOfObjectsPtr | initRobotModelVisualization () |
| |
| mrpt::opengl::CSetOfObjectsPtr | initRobotModelVisualization () |
| |
| mrpt::opengl::CSetOfObjectsPtr | initRobotModelVisualizationInternal (const mrpt::poses::CPose2D &p_unused) |
| |
| mrpt::opengl::CSetOfObjectsPtr | initRobotModelVisualizationInternal (const mrpt::poses::CPose2D &p_unused) |
| |
| mrpt::opengl::CSetOfObjectsPtr | initRobotModelVisualizationInternal (const mrpt::poses::CPose3D &p_unused) |
| |
| mrpt::opengl::CSetOfObjectsPtr | initRobotModelVisualizationInternal (const mrpt::poses::CPose3D &p_unused) |
| |
| void | initSlamMetricVisualization () |
| |
| void | initVisualization () |
| |
| void | initVisualization () |
| |
| void | queryObserverForEvents () |
| |
| mrpt::opengl::CSetOfObjectsPtr | setCurrentPositionModel (const std::string &model_name, const mrpt::utils::TColor &model_color=mrpt::utils::TColor(0, 0, 0), const size_t model_size=1, const pose_t &init_pose=pose_t()) |
| |
| virtual void | setObjectPropsFromNodeID (const mrpt::utils::TNodeID nodeID, mrpt::opengl::CSetOfObjectsPtr &viz_object) |
| |
| virtual void | setObjectPropsFromNodeID (const mrpt::utils::TNodeID nodeID, mrpt::opengl::CSetOfObjectsPtr &viz_object) |
| |
| void | toggleEstimatedTrajectoryVisualization () |
| |
| void | toggleEstimatedTrajectoryVisualization () |
| |
| void | toggleGTVisualization () |
| |
| void | toggleGTVisualization () |
| |
| void | toggleMapVisualization () |
| |
| void | toggleMapVisualization () |
| |
| void | toggleOdometryVisualization () |
| |
| void | toggleOdometryVisualization () |
| |
| void | updateAllVisuals () |
| |
| void | updateAllVisuals () |
| |
| virtual void | updateCurrPosViewport () |
| |
| virtual void | updateCurrPosViewport () |
| |
| void | updateEstimatedTrajectoryVisualization (bool full_update=false) |
| |
| void | updateEstimatedTrajectoryVisualization (bool full_update=false) |
| |
| void | updateGTVisualization () |
| |
| void | updateGTVisualization () |
| |
| void | updateIntensityImageViewport () |
| |
| void | updateIntensityImageViewport () |
| |
| void | updateMapVisualization (const std::map< mrpt::utils::TNodeID, mrpt::obs::CObservation2DRangeScanPtr > &nodes_to_laser_scans2D, bool full_update=false) |
| |
| void | updateMapVisualization (const std::map< mrpt::utils::TNodeID, mrpt::obs::CObservation2DRangeScanPtr > &nodes_to_laser_scans2D, bool full_update=false) |
| |
| void | updateOdometryVisualization () |
| |
| void | updateOdometryVisualization () |
| |
| void | updateRangeImageViewport () |
| |
| void | updateRangeImageViewport () |
| |
| void | updateSlamMetricVisualization () |
| |
| void | updateSlamMetricVisualization () |
| |
| static double | accumulateAngleDiffs (const mrpt::poses::CPose2D &p1, const mrpt::poses::CPose2D &p2) |
| |
| static double | accumulateAngleDiffs (const mrpt::poses::CPose3D &p1, const mrpt::poses::CPose3D &p2) |
| |
| static double | accumulateAngleDiffs (const mrpt::poses::CPose2D &p1, const mrpt::poses::CPose2D &p2) |
| |
| static double | accumulateAngleDiffs (const mrpt::poses::CPose3D &p1, const mrpt::poses::CPose3D &p2) |
| |
| static mrpt::system::TTimeStamp | getTimeStamp (const mrpt::obs::CActionCollectionPtr action, const mrpt::obs::CSensoryFramePtr observations, const mrpt::obs::CObservationPtr observation) |
| |
| ros::CallbackQueue | custom_service_queue |
| | Custom Callback queue for processing requests for the services outside the standard CallbackQueue. More...
|
| |
| int | m_queue_size |
| |
| std::string | m_class_name |
| |
| std::string | m_config_fname |
| |
| double | m_curr_deformation_energy |
| |
| pose_t | m_curr_odometry_only_pose |
| |
| mrpt::system::TTimeStamp | m_curr_timestamp |
| |
| std::string | m_current_constraint_type |
| |
| mrpt::utils::TColor | m_current_constraint_type_color |
| |
| double | m_dataset_grab_time |
| |
| std::vector< double > | m_deformation_energy_vec |
| |
| mrpt::graphslam::detail::CEdgeCounter | m_edge_counter |
| |
| mrpt::graphslam::deciders::CEdgeRegistrationDecider< GRAPH_T > * | m_edge_reg |
| |
| bool | m_enable_curr_pos_viewport |
| |
| bool | m_enable_intensity_viewport |
| |
| bool | m_enable_range_viewport |
| |
| const bool | m_enable_visuals |
| |
| mrpt::utils::TColor | m_estimated_traj_color |
| |
| mrpt::obs::CObservation2DRangeScanPtr | m_first_laser_scan2D |
| |
| std::string | m_fname_GT |
| |
| GRAPH_T | m_graph |
| |
| mrpt::synch::CCriticalSection | m_graph_section |
| |
| mrpt::maps::COccupancyGridMap2DPtr | m_gridmap_cached |
| |
| mrpt::utils::TColor | m_GT_color |
| |
| std::string | m_GT_file_format |
| |
| std::vector< pose_t > | m_GT_poses |
| |
| size_t | m_GT_poses_index |
| |
| size_t | m_GT_poses_step |
| |
| bool | m_has_read_config |
| |
| std::string | m_img_external_storage_dir |
| |
| std::string | m_img_prev_path_base |
| |
| struct mrpt::graphslam::CGraphSlamEngine::TRGBDInfoFileParams | m_info_params |
| |
| mrpt::system::TTimeStamp | m_init_timestamp |
| |
| bool | m_is_first_time_node_reg |
| |
| bool | m_is_paused |
| |
| std::string | m_keystroke_estimated_trajectory |
| |
| std::string | m_keystroke_GT |
| |
| std::string | m_keystroke_map |
| |
| std::string | m_keystroke_odometry |
| |
| std::string | m_keystroke_pause_exec |
| |
| mrpt::obs::CObservation2DRangeScanPtr | m_last_laser_scan2D |
| |
| mrpt::obs::CObservation3DRangeScanPtr | m_last_laser_scan3D |
| |
| mrpt::system::TTimeStamp | m_map_acq_time |
| |
| bool | m_map_is_cached |
| |
| mrpt::graphslam::deciders::CNodeRegistrationDecider< GRAPH_T > * | m_node_reg |
| |
| mrpt::utils::TNodeID | m_nodeID_max |
| |
| std::map< mrpt::utils::TNodeID, size_t > | m_nodeID_to_gt_indices |
| |
| nodes_to_scans2D_t | m_nodes_to_laser_scans2D |
| |
| bool | m_observation_only_dataset |
| |
| mrpt::maps::COctoMapPtr | m_octomap_cached |
| |
| mrpt::utils::TColor | m_odometry_color |
| |
| std::vector< pose_t > | m_odometry_poses |
| |
| double | m_offset_x_left |
| |
| double | m_offset_y_current_constraint_type |
| |
| double | m_offset_y_estimated_traj |
| |
| double | m_offset_y_GT |
| |
| double | m_offset_y_odometry |
| |
| double | m_offset_y_paused_message |
| |
| double | m_offset_y_timestamp |
| |
| mrpt::utils::TColor | m_optimized_map_color |
| |
| mrpt::graphslam::optimizers::CGraphSlamOptimizer< GRAPH_T > * | m_optimizer |
| |
| fstreams_out | m_out_streams |
| |
| const std::string | m_paused_message |
| |
| std::string | m_rawlog_fname |
| |
| bool | m_request_to_exit |
| |
| size_t | m_robot_model_size |
| |
| mrpt::math::CMatrixDouble33 | m_rot_TUM_to_MRPT |
| |
| mrpt::maps::CSimpleMap | m_simple_map_cached |
| |
| std::vector< std::string > | m_supported_constraint_types |
| |
| int | m_text_index_current_constraint_type |
| |
| int | m_text_index_estimated_traj |
| |
| int | m_text_index_GT |
| |
| int | m_text_index_odometry |
| |
| int | m_text_index_paused_message |
| |
| int | m_text_index_timestamp |
| |
| mrpt::utils::CTimeLogger | m_time_logger |
| |
| bool | m_use_GT |
| |
| bool | m_user_decides_about_output_dir |
| |
| bool | m_visualize_estimated_trajectory |
| |
| bool | m_visualize_GT |
| |
| bool | m_visualize_map |
| |
| bool | m_visualize_odometry_poses |
| |
| bool | m_visualize_SLAM_metric |
| |
| mrpt::gui::CDisplayWindow3D * | m_win |
| |
| mrpt::graphslam::CWindowManager * | m_win_manager |
| |
| mrpt::graphslam::CWindowObserver * | m_win_observer |
| |
| mrpt::gui::CDisplayWindowPlots * | m_win_plot |
| |
| static const std::string | header_sep |
| |
| static const std::string | report_sep |
| |
template<class GRAPH_T>
class mrpt::graphslam::CGraphSlamEngine_MR< GRAPH_T >
mrpt::graphslam::CGraphSlamEngine derived class for executing multi-robot graphSLAM
Definition at line 67 of file CGraphSlamEngine_MR.h.
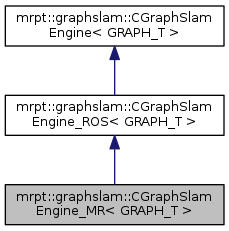
 Public Types inherited from mrpt::graphslam::CGraphSlamEngine_ROS< GRAPH_T >
Public Types inherited from mrpt::graphslam::CGraphSlamEngine_ROS< GRAPH_T >