Header file for the class ReflexxesAPI (API of the Reflexxes Motion Libraries) More...
#include "RMLPositionInputParameters.h"#include "RMLPositionOutputParameters.h"#include "RMLPositionFlags.h"#include "RMLVelocityInputParameters.h"#include "RMLVelocityOutputParameters.h"#include "RMLVelocityFlags.h"#include "RMLVector.h"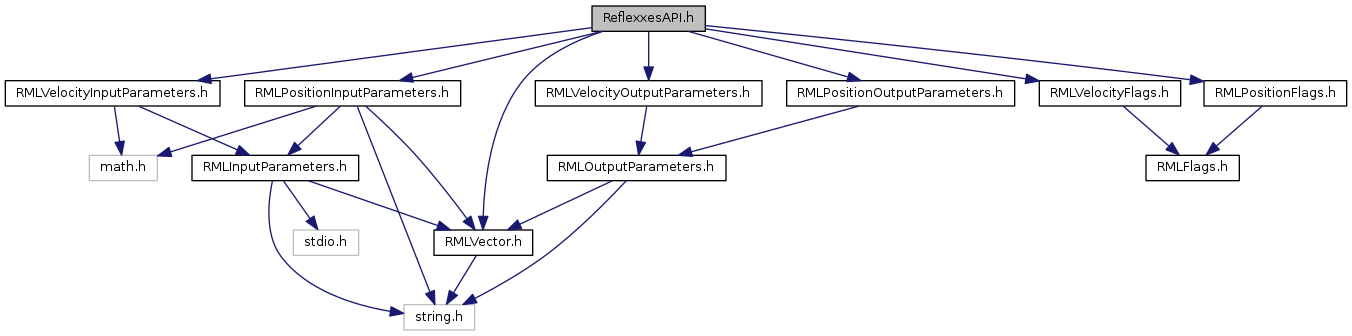

Go to the source code of this file.
Classes | |
| class | ReflexxesAPI |
| This class constitutes the API of the Reflexxes Motion Libraries More... | |
Detailed Description
Header file for the class ReflexxesAPI (API of the Reflexxes Motion Libraries)
The class ReflexxesAPI is the interface between the actual On-Line Trajectory Generation algorithms of the Reflexxes Motion Libraries and the applications using it. It wraps the classes of the algorithms, provides a simple and clean interface, and it hides all parts of the implementation that or not relevant the actual implementation behind its interface.
The only two relevant functions of a Reflexxes Motion Library are the the methods
- ReflexxesAPI::RMLPosition(), which calls TypeIVRMLPosition::GetNextStateOfMotion() of the class TypeIVRMLPosition, to execute the position-based On-Line Trajectory Generation algorithm and
- ReflexxesAPI::RMLVelocity(), which calls TypeIVRMLVelocity::GetNextStateOfMotion() of the class TypeIVRMLVelocity, to execute the velocity-based On-Line Trajectory Generation algorithm,
both of which calculate a new state of motion from any arbitrary initial state of motion.
Both methods, require the specification of a set of input values
- RMLPositionInputParameters / RMLVelocityInputParameters (cf. page_InputValues)
and a data structure specifying a certain behavior of the algorithm
Based on these input values, the result, that is, the state of motion for the succeeding control cycle, is written to an
- RMLPositionOutputParameters / RMLVelocityOutputParameters (cf. page_OutputValues)
object.
To get an overview about the source code, please refer to the page_SourceCode. A brief survey of the Reflexxes algorithm can be found at the page page_TypeIIAndIVOverview, and error-handling procedures are described at page_ErrorHandling.
Besides the classes for the input and output parameters, this class is is the only one that has to be embedded in a user application. The interface only consists of the constructor and the two methods RMLPosition() and RMLVelocity(), such that an integration into existing systems can be done in a clear and straight-forward way.
- See also
- RMLPositionInputParameters
- RMLVelocityInputParameters
- RMLPositionOutputParameters
- RMLVelocityOutputParameters
- RMLPositionFlags
- RMLVelocityFlags
- page_GettingStarted
- page_SourceCode
- page_TypeIIAndIVOverview
- page_ErrorHandling
- Date
- March 2014
- Version
- 1.2.6
- Copyright
- Copyright (C) 2014 Google, Inc.
GNU Lesser General Public License
This file is part of the Type II Reflexxes Motion Library.
The Type II Reflexxes Motion Library is free software: you can redistribute it and/or modify it under the terms of the GNU Lesser General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version.
The Type II Reflexxes Motion Library is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License along with the Type II Reflexxes Motion Library. If not, see http://www.gnu.org/licenses/.
Definition in file ReflexxesAPI.h.