Implementation file for the user interface (API) More...
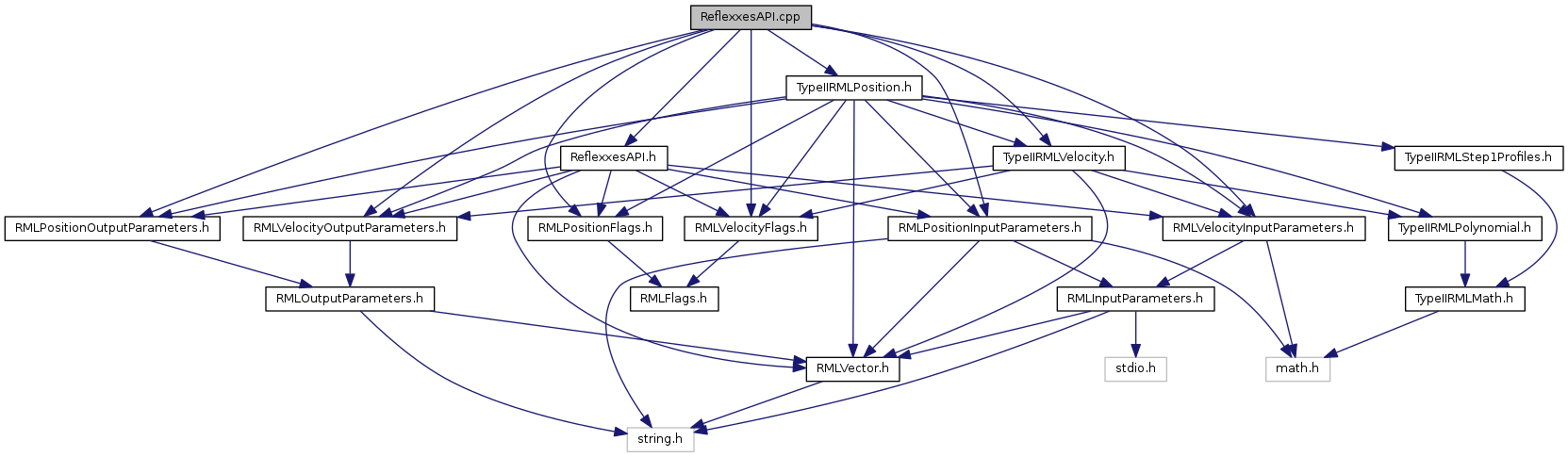
#include <ReflexxesAPI.h>#include <TypeIIRMLPosition.h>#include <TypeIIRMLVelocity.h>#include <RMLPositionInputParameters.h>#include <RMLPositionOutputParameters.h>#include <RMLPositionFlags.h>#include <RMLVelocityInputParameters.h>#include <RMLVelocityOutputParameters.h>#include <RMLVelocityFlags.h>
Include dependency graph for ReflexxesAPI.cpp:
Go to the source code of this file.
Detailed Description
Implementation file for the user interface (API)
Implementation file for all methods of the class ReflexxesAPI, which constitutes the user API for On-Line Trajectory Generation algorithms. For further information, please refer to the file ReflexxesAPI.h.
- Date
- March 2014
- Version
- 1.2.6
- Copyright
- Copyright (C) 2014 Google, Inc.
GNU Lesser General Public License
This file is part of the Type II Reflexxes Motion Library.
The Type II Reflexxes Motion Library is free software: you can redistribute it and/or modify it under the terms of the GNU Lesser General Public License as published by the Free Software Foundation, either version 3 of the License, or (at your option) any later version.
The Type II Reflexxes Motion Library is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License along with the Type II Reflexxes Motion Library. If not, see http://www.gnu.org/licenses/.
Definition in file ReflexxesAPI.cpp.