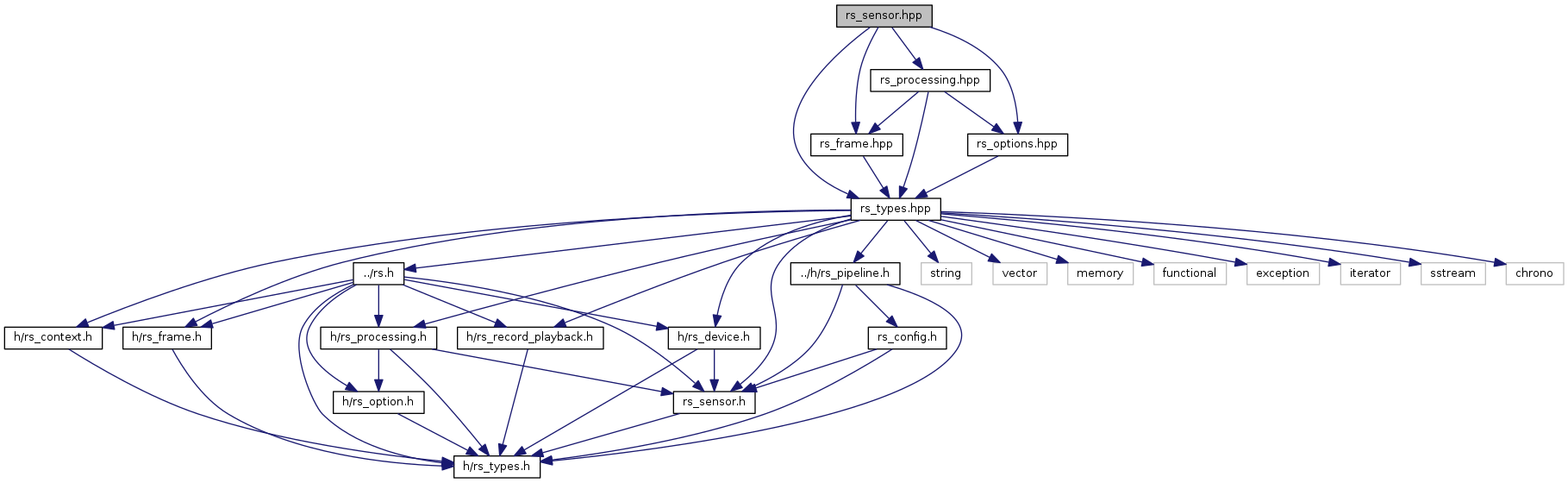
#include "rs_types.hpp"#include "rs_frame.hpp"#include "rs_processing.hpp"#include "rs_options.hpp"
Include dependency graph for rs_sensor.hpp:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | rs2::calibrated_sensor |
| class | rs2::color_sensor |
| class | rs2::debug_stream_sensor |
| class | rs2::depth_sensor |
| class | rs2::depth_stereo_sensor |
| class | rs2::fisheye_sensor |
| class | rs2::max_usable_range_sensor |
| class | rs2::motion_sensor |
| class | rs2::notification |
| class | rs2::notifications_callback< T > |
| class | rs2::pose_sensor |
| class | rs2::roi_sensor |
| class | rs2::sensor |
| class | rs2::wheel_odometer |
Namespaces | |
| rs2 | |
Functions | |
| bool | rs2::operator== (const sensor &lhs, const sensor &rhs) |
| std::shared_ptr< sensor > | rs2::sensor_from_frame (frame f) |