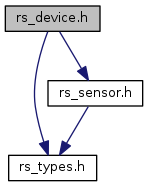
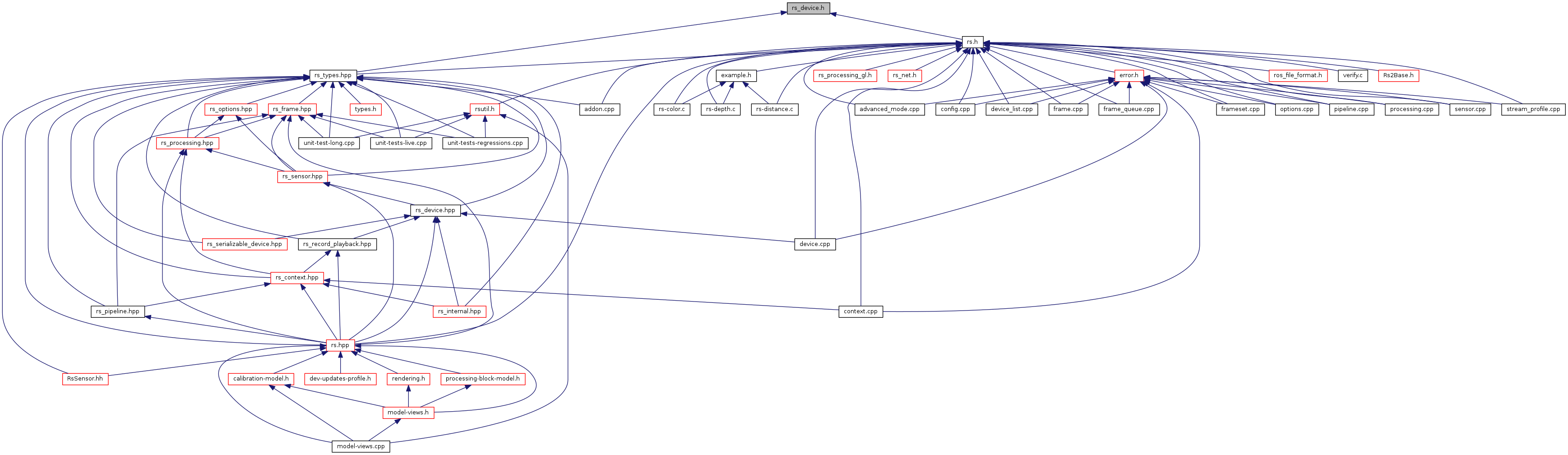
Exposes RealSense device functionality for C compilers. More...
Go to the source code of this file.
Macros | |
| #define | RS2_UNSIGNED_UPDATE_MODE_FULL 2 |
| #define | RS2_UNSIGNED_UPDATE_MODE_READ_ONLY 1 |
| #define | RS2_UNSIGNED_UPDATE_MODE_UPDATE 0 |
Typedefs | |
| typedef struct rs2_calibration_change_callback | rs2_calibration_change_callback |
| typedef void(* | rs2_calibration_change_callback_ptr) (rs2_calibration_status, void *arg) |
| typedef enum rs2_calibration_status | rs2_calibration_status |
| typedef enum rs2_calibration_type | rs2_calibration_type |
Enumerations | |
| enum | rs2_calibration_status { RS2_CALIBRATION_TRIGGERED = 0, RS2_CALIBRATION_SPECIAL_FRAME = 1, RS2_CALIBRATION_STARTED = 2, RS2_CALIBRATION_NOT_NEEDED = 3, RS2_CALIBRATION_SUCCESSFUL = 4, RS2_CALIBRATION_RETRY = -1, RS2_CALIBRATION_FAILED = -2, RS2_CALIBRATION_SCENE_INVALID = -3, RS2_CALIBRATION_BAD_RESULT = -4, RS2_CALIBRATION_BAD_CONDITIONS = -5, RS2_CALIBRATION_STATUS_FIRST = -5, RS2_CALIBRATION_STATUS_LAST = 4, RS2_CALIBRATION_STATUS_COUNT = RS2_CALIBRATION_STATUS_LAST - RS2_CALIBRATION_STATUS_FIRST + 1 } |
| enum | rs2_calibration_type { RS2_CALIBRATION_AUTO_DEPTH_TO_RGB, RS2_CALIBRATION_MANUAL_DEPTH_TO_RGB, RS2_CALIBRATION_THERMAL, RS2_CALIBRATION_TYPE_COUNT } |
Detailed Description
Exposes RealSense device functionality for C compilers.
Definition in file rs_device.h.
Macro Definition Documentation
| #define RS2_UNSIGNED_UPDATE_MODE_FULL 2 |
Definition at line 208 of file rs_device.h.
| #define RS2_UNSIGNED_UPDATE_MODE_READ_ONLY 1 |
Definition at line 207 of file rs_device.h.
| #define RS2_UNSIGNED_UPDATE_MODE_UPDATE 0 |
Definition at line 206 of file rs_device.h.
Typedef Documentation
| typedef struct rs2_calibration_change_callback rs2_calibration_change_callback |
Definition at line 377 of file rs_device.h.
| typedef void(* rs2_calibration_change_callback_ptr) (rs2_calibration_status, void *arg) |
Definition at line 378 of file rs_device.h.
| typedef enum rs2_calibration_status rs2_calibration_status |
Used in device_calibration with rs2_calibration_change_callback
| typedef enum rs2_calibration_type rs2_calibration_type |
Used in device_calibration; enumerates the different calibration types available for that extension.
Enumeration Type Documentation
Used in device_calibration with rs2_calibration_change_callback
Definition at line 356 of file rs_device.h.
| enum rs2_calibration_type |
Used in device_calibration; enumerates the different calibration types available for that extension.
| Enumerator | |
|---|---|
| RS2_CALIBRATION_AUTO_DEPTH_TO_RGB | |
| RS2_CALIBRATION_MANUAL_DEPTH_TO_RGB | |
| RS2_CALIBRATION_THERMAL | |
| RS2_CALIBRATION_TYPE_COUNT | |
Definition at line 344 of file rs_device.h.
Function Documentation
| const char* rs2_calibration_status_to_string | ( | rs2_calibration_status | ) |
| const char* rs2_calibration_type_to_string | ( | rs2_calibration_type | ) |
| void rs2_connect_tm2_controller | ( | const rs2_device * | device, |
| const unsigned char * | mac_addr, | ||
| rs2_error ** | error | ||
| ) |
| rs2_device* rs2_create_device | ( | const rs2_device_list * | info_list, |
| int | index, | ||
| rs2_error ** | error | ||
| ) |
Creates a device by index. The device object represents a physical camera and provides the means to manipulate it.
- Parameters
-
[in] info_list the list containing the device to retrieve [in] index The zero based index of device to retrieve [out] error If non-null, receives any error that occurs during this call, otherwise, errors are ignored
- Returns
- The requested device, should be released by rs2_delete_device
| const rs2_raw_data_buffer* rs2_create_flash_backup | ( | const rs2_device * | device, |
| rs2_update_progress_callback_ptr | callback, | ||
| void * | client_data, | ||
| rs2_error ** | error | ||
| ) |
Create backup of camera flash memory. Such backup does not constitute valid firmware image, and cannot be loaded back to the device, but it does contain all calibration and device information.
- Parameters
-
[in] device Device to update [in] callback Optional callback for update progress notifications, the progress value is normailzed to 1 [in] client_data Optional client data for the callback [out] error If non-null, receives any error that occurs during this call, otherwise, errors are ignored
| const rs2_raw_data_buffer* rs2_create_flash_backup_cpp | ( | const rs2_device * | device, |
| rs2_update_progress_callback * | callback, | ||
| rs2_error ** | error | ||
| ) |
Create backup of camera flash memory. Such backup does not constitute valid firmware image, and cannot be loaded back to the device, but it does contain all calibration and device information.
- Parameters
-
[in] device Device to update [in] callback Optional callback for update progress notifications, the progress value is normailzed to 1 [out] error If non-null, receives any error that occurs during this call, otherwise, errors are ignored
| void rs2_delete_device | ( | rs2_device * | device | ) |
| void rs2_delete_device_list | ( | rs2_device_list * | info_list | ) |
| int rs2_device_list_contains | ( | const rs2_device_list * | info_list, |
| const rs2_device * | device, | ||
| rs2_error ** | error | ||
| ) |
Checks if a specific device is contained inside a device list.
- Parameters
-
[in] info_list The list of devices to check in [in] device RealSense device to check for [out] error If non-null, receives any error that occurs during this call, otherwise, errors are ignored
- Returns
- True if the device is in the list and false otherwise
| void rs2_disconnect_tm2_controller | ( | const rs2_device * | device, |
| int | id, | ||
| rs2_error ** | error | ||
| ) |
| void rs2_enter_update_state | ( | const rs2_device * | device, |
| rs2_error ** | error | ||
| ) |
| const rs2_raw_data_buffer* rs2_get_calibration_table | ( | const rs2_device * | dev, |
| rs2_error ** | error | ||
| ) |
| int rs2_get_device_count | ( | const rs2_device_list * | info_list, |
| rs2_error ** | error | ||
| ) |
| const char* rs2_get_device_info | ( | const rs2_device * | device, |
| rs2_camera_info | info, | ||
| rs2_error ** | error | ||
| ) |
Retrieve camera specific information, like versions of various internal components.
- Parameters
-
[in] device The RealSense device [in] info Camera info type to retrieve [out] error If non-null, receives any error that occurs during this call, otherwise, errors are ignored
- Returns
- The requested camera info string, in a format specific to the device model
| void rs2_hardware_reset | ( | const rs2_device * | device, |
| rs2_error ** | error | ||
| ) |
Send hardware reset request to the device. The actual reset is asynchronous. Note: Invalidates all handles to this device.
- Parameters
-
[in] device The RealSense device to reset [out] error If non-null, receives any error that occurs during this call, otherwise, errors are ignored
| int rs2_is_device_extendable_to | ( | const rs2_device * | device, |
| rs2_extension | extension, | ||
| rs2_error ** | error | ||
| ) |
Test if the given device can be extended to the requested extension.
- Parameters
-
[in] device Realsense device [in] extension The extension to which the device should be tested if it is extendable [out] error If non-null, receives any error that occurs during this call, otherwise, errors are ignored
- Returns
- Non-zero value iff the device can be extended to the given extension
| void rs2_load_json | ( | rs2_device * | dev, |
| const void * | json_content, | ||
| unsigned | content_size, | ||
| rs2_error ** | error | ||
| ) |
| void rs2_loopback_disable | ( | const rs2_device * | device, |
| rs2_error ** | error | ||
| ) |
| void rs2_loopback_enable | ( | const rs2_device * | device, |
| const char * | from_file, | ||
| rs2_error ** | error | ||
| ) |
Enter the given device into loopback operation mode that uses the given file as input for raw data
- Parameters
-
[in] device Device to enter into loopback operation mode [in] from_file Path to bag file with raw data for loopback [out] error If non-null, receives any error that occurs during this call, otherwise, errors are ignored
| int rs2_loopback_is_enabled | ( | const rs2_device * | device, |
| rs2_error ** | error | ||
| ) |
Checks if the device is in loopback mode or not
- Parameters
-
[in] device Device to check for operation mode [out] error If non-null, receives any error that occurs during this call, otherwise, errors are ignored
- Returns
- true if the device is in loopback operation mode
| rs2_sensor_list* rs2_query_sensors | ( | const rs2_device * | device, |
| rs2_error ** | error | ||
| ) |
Create a static snapshot of all connected sensors within a specific device.
- Parameters
-
[in] device Specific RealSense device [out] error If non-null, receives any error that occurs during this call, otherwise, errors are ignored
- Returns
- The list of sensors, should be released by rs2_delete_sensor_list
| void rs2_register_calibration_change_callback | ( | rs2_device * | dev, |
| rs2_calibration_change_callback_ptr | callback, | ||
| void * | user, | ||
| rs2_error ** | error | ||
| ) |
Adds a callback for a sensor that gets called when calibration (intrinsics) changes, e.g. due to auto-calibration
- Parameters
-
[in] sensor the sensor [in] callback the C callback function that gets called [in] user user argument that gets passed to the callback function [out] error if non-null, receives any error that occurs during this call, otherwise, errors are ignored
| void rs2_register_calibration_change_callback_cpp | ( | rs2_device * | dev, |
| rs2_calibration_change_callback * | callback, | ||
| rs2_error ** | error | ||
| ) |
Adds a callback for a sensor that gets called when calibration (intrinsics) changes, e.g. due to auto-calibration
- Parameters
-
[in] sensor the sensor [in] callback the C++ callback interface that gets called [out] error if non-null, receives any error that occurs during this call, otherwise, errors are ignored
| void rs2_reset_to_factory_calibration | ( | const rs2_device * | device, |
| rs2_error ** | e | ||
| ) |
| const rs2_raw_data_buffer* rs2_run_on_chip_calibration | ( | rs2_device * | device, |
| const void * | json_content, | ||
| int | content_size, | ||
| float * | health, | ||
| rs2_update_progress_callback_ptr | callback, | ||
| void * | client_data, | ||
| int | timeout_ms, | ||
| rs2_error ** | error | ||
| ) |
This will improve the depth noise.
- Parameters
-
[in] json_content Json string to configure regular speed on chip calibration parameters: { "calib type" : 0, "speed": 3, "scan parameter": 0, "adjust both sides": 0, "white wall mode": 0 } calib_type - calibraton type: 0 = regular, 1 = focal length, 2 = both regular and focal length in order speed - for regular calibration, value can be one of: Very fast = 0, Fast = 1, Medium = 2, Slow = 3, White wall = 4, default is Slow for type 0 and Fast for type 2 scan_parameter - for regular calibration. value can be one of: Py scan (default) = 0, Rx scan = 1 adjust_both_sides - for focal length calibration. value can be one of: 0 = adjust right only, 1 = adjust both sides white_wall_mode - white wall mode: 0 for normal mode and 1 for white wall mode if json is nullptr it will be ignored and calibration will use the default parameters [out] health The absolute value of regular calibration Health-Check captures how far camera calibration is from the optimal one [0, 0.25) - Good [0.25, 0.75) - Can be Improved [0.75, ) - Requires Calibration The absolute value of focal length calibration Health-Check captures how far camera calibration is from the optimal one [0, 0.15) - Good [0.15, 0.75) - Can be Improved [0.75, ) - Requires Calibration The two health numbers are encoded in one integer as follows for calib_type 2: Regular health number times 1000 are bits 0 to 11 Regular health number is negative if bit 24 is 1 Focal length health number times 1000 are bits 12 to 23 Focal length health number is negative if bit 25 is 1 [in] callback Optional callback for update progress notifications, the progress value is normailzed to 1 [in] client_data Optional client data for the callback [in] timeout_ms Timeout in ms (use 5000 msec unless instructed otherwise)
- Returns
- New calibration table
| const rs2_raw_data_buffer* rs2_run_on_chip_calibration_cpp | ( | rs2_device * | device, |
| const void * | json_content, | ||
| int | content_size, | ||
| float * | health, | ||
| rs2_update_progress_callback * | progress_callback, | ||
| int | timeout_ms, | ||
| rs2_error ** | error | ||
| ) |
This will improve the depth noise.
- Parameters
-
[in] json_content Json string to configure regular speed on chip calibration parameters: { "calib type" : 0, "speed": 3, "scan parameter": 0, "adjust both sides": 0, "white wall mode": 0 } calib_type - calibraton type: 0 = regular, 1 = focal length, 2 = both regular and focal length in order speed - for regular calibration. value can be one of: Very fast = 0, Fast = 1, Medium = 2, Slow = 3, White wall = 4, default is Slow for type 0 and Fast for type 2 scan_parameter - for regular calibration. value can be one of: Py scan (default) = 0, Rx scan = 1 adjust_both_sides - for focal length calibration. value can be one of: 0 = adjust right only, 1 = adjust both sides white_wall_mode - white wall mode: 0 for normal mode and 1 for white wall mode if json is nullptr it will be ignored and calibration will use the default parameters [out] health The absolute value of regular calibration Health-Check captures how far camera calibration is from the optimal one [0, 0.25) - Good [0.25, 0.75) - Can be Improved [0.75, ) - Requires Calibration The absolute value of focal length calibration Health-Check captures how far camera calibration is from the optimal one [0, 0.15) - Good [0.15, 0.75) - Can be Improved [0.75, ) - Requires Calibration The two health numbers are encoded in one integer as follows for calib_type 2: Regular health number times 1000 are bits 0 to 11 Regular health number is negative if bit 24 is 1 Focal length health number times 1000 are bits 12 to 23 Focal length health number is negative if bit 25 is 1 [in] callback Optional callback to get progress notifications [in] timeout_ms Timeout in ms (use 5000 msec unless instructed otherwise)
- Returns
- New calibration table
| const rs2_raw_data_buffer* rs2_run_tare_calibration | ( | rs2_device * | dev, |
| float | ground_truth_mm, | ||
| const void * | json_content, | ||
| int | content_size, | ||
| rs2_update_progress_callback_ptr | callback, | ||
| void * | client_data, | ||
| int | timeout_ms, | ||
| rs2_error ** | error | ||
| ) |
This will adjust camera absolute distance to flat target. User needs to enter the known ground truth.
- Parameters
-
[in] ground_truth_mm Ground truth in mm must be between 60 and 10000 [in] json_content Json string to configure tare calibration parameters: { "average_step_count": 20, "step count": 20, "accuracy": 2, "scan parameter": 0, "data sampling": 0 } average step count - number of frames to average, must be between 1 - 30, default = 20 step count - max iteration steps, must be between 5 - 30, default = 10 accuracy - Subpixel accuracy level, value can be one of: Very high = 0 (0.025%), High = 1 (0.05%), Medium = 2 (0.1%), Low = 3 (0.2%), Default = Very high (0.025%), default is very high (0.025%) scan_parameter - value can be one of: Py scan (default) = 0, Rx scan = 1 data_sampling - value can be one of:polling data sampling = 0, interrupt data sampling = 1 if json is nullptr it will be ignored and calibration will use the default parameters [in] content_size Json string size if its 0 the json will be ignored and calibration will use the default parameters [in] callback Optional callback for update progress notifications, the progress value is normailzed to 1 [in] client_data Optional client data for the callback [in] timeout_ms Timeout in ms (use 5000 msec unless instructed otherwise)
- Returns
- New calibration table
| const rs2_raw_data_buffer* rs2_run_tare_calibration_cpp | ( | rs2_device * | dev, |
| float | ground_truth_mm, | ||
| const void * | json_content, | ||
| int | content_size, | ||
| rs2_update_progress_callback * | progress_callback, | ||
| int | timeout_ms, | ||
| rs2_error ** | error | ||
| ) |
This will adjust camera absolute distance to flat target. User needs to enter the known ground truth.
- Parameters
-
[in] ground_truth_mm Ground truth in mm must be between 60 and 10000 [in] json_content Json string to configure tare calibration parameters: { "average step count": 20, "step count": 20, "accuracy": 2, "scan parameter": 0, "data sampling": 0 } average step count - number of frames to average, must be between 1 - 30, default = 20 step count - max iteration steps, must be between 5 - 30, default = 10 accuracy - Subpixel accuracy level, value can be one of: Very high = 0 (0.025%), High = 1 (0.05%), Medium = 2 (0.1%), Low = 3 (0.2%), Default = Very high (0.025%), default is very high (0.025%) scan_parameter - value can be one of: Py scan (default) = 0, Rx scan = 1 data_sampling - value can be one of:polling data sampling = 0, interrupt data sampling = 1 if json is nullptr it will be ignored and calibration will use the default parameters [in] content_size Json string size if its 0 the json will be ignored and calibration will use the default parameters [in] callback Optional callback to get progress notifications [in] timeout_ms Timeout in ms (use 5000 msec unless instructed otherwise)
- Returns
- New calibration table
| const rs2_raw_data_buffer* rs2_send_and_receive_raw_data | ( | rs2_device * | device, |
| void * | raw_data_to_send, | ||
| unsigned | size_of_raw_data_to_send, | ||
| rs2_error ** | error | ||
| ) |
Send raw data to device
- Parameters
-
[in] device RealSense device to send data to [in] raw_data_to_send Raw data to be sent to device [in] size_of_raw_data_to_send Size of raw_data_to_send in bytes [out] error If non-null, receives any error that occurs during this call, otherwise, errors are ignored
- Returns
- Device's response in a rs2_raw_data_buffer, which should be released by rs2_delete_raw_data
| rs2_raw_data_buffer* rs2_serialize_json | ( | rs2_device * | dev, |
| rs2_error ** | error | ||
| ) |
| void rs2_set_calibration_table | ( | const rs2_device * | device, |
| const void * | calibration, | ||
| int | calibration_size, | ||
| rs2_error ** | error | ||
| ) |
| int rs2_supports_device_info | ( | const rs2_device * | device, |
| rs2_camera_info | info, | ||
| rs2_error ** | error | ||
| ) |
Check if a camera supports a specific camera info type.
- Parameters
-
[in] device The RealSense device to check [in] info The parameter to check for support [out] error If non-null, receives any error that occurs during this call, otherwise, errors are ignored
- Returns
- True if the parameter both exist and well-defined for the specific device
| void rs2_trigger_device_calibration | ( | rs2_device * | dev, |
| rs2_calibration_type | type, | ||
| rs2_error ** | error | ||
| ) |
| void rs2_update_firmware | ( | const rs2_device * | device, |
| const void * | fw_image, | ||
| int | fw_image_size, | ||
| rs2_update_progress_callback_ptr | callback, | ||
| void * | client_data, | ||
| rs2_error ** | error | ||
| ) |
Update device to the provided firmware, the device must be extendable to RS2_EXTENSION_UPDATABLE. This call is executed on the caller's thread and it supports progress notifications via the optional callback.
- Parameters
-
[in] device Device to update [in] fw_image Firmware image buffer [in] fw_image_size Firmware image buffer size [in] callback Optional callback for update progress notifications, the progress value is normailzed to 1 [in] client_data Optional client data for the callback [out] error If non-null, receives any error that occurs during this call, otherwise, errors are ignored
| void rs2_update_firmware_cpp | ( | const rs2_device * | device, |
| const void * | fw_image, | ||
| int | fw_image_size, | ||
| rs2_update_progress_callback * | callback, | ||
| rs2_error ** | error | ||
| ) |
Update device to the provided firmware, the device must be extendable to RS2_EXTENSION_UPDATABLE. This call is executed on the caller's thread and it supports progress notifications via the optional callback.
- Parameters
-
[in] device Device to update [in] fw_image Firmware image buffer [in] fw_image_size Firmware image buffer size [in] callback Optional callback for update progress notifications, the progress value is normailzed to 1 [out] error If non-null, receives any error that occurs during this call, otherwise, errors are ignored
| void rs2_update_firmware_unsigned | ( | const rs2_device * | device, |
| const void * | fw_image, | ||
| int | fw_image_size, | ||
| rs2_update_progress_callback_ptr | callback, | ||
| void * | client_data, | ||
| int | update_mode, | ||
| rs2_error ** | error | ||
| ) |
Update device to the provided firmware by writing raw data directly to the flash, this command can be executed only on unlocked camera. The device must be extendable to RS2_EXTENSION_UPDATABLE. This call is executed on the caller's thread and it supports progress notifications via the optional callback.
- Parameters
-
[in] device Device to update [in] fw_image Firmware image buffer [in] fw_image_size Firmware image buffer size [in] callback Optional callback for update progress notifications, the progress value is normailzed to 1 [in] client_data Optional client data for the callback [in] update_mode Select one of RS2_UNSIGNED_UPDATE_MODE, WARNING!!! setting to any option other than RS2_UNSIGNED_UPDATE_MODE_UPDATE will make this call unsafe and might damage the camera [out] error If non-null, receives any error that occurs during this call, otherwise, errors are ignored
| void rs2_update_firmware_unsigned_cpp | ( | const rs2_device * | device, |
| const void * | fw_image, | ||
| int | fw_image_size, | ||
| rs2_update_progress_callback * | callback, | ||
| int | update_mode, | ||
| rs2_error ** | error | ||
| ) |
Update device to the provided firmware by writing raw data directly to the flash, this command can be executed only on unlocked camera. The device must be extendable to RS2_EXTENSION_UPDATABLE. This call is executed on the caller's thread and it supports progress notifications via the optional callback.
- Parameters
-
[in] device Device to update [in] fw_image Firmware image buffer [in] fw_image_size Firmware image buffer size [in] callback Optional callback for update progress notifications, the progress value is normailzed to 1 [in] update_mode Select one of RS2_UNSIGNED_UPDATE_MODE, WARNING!!! setting to any option other than RS2_UNSIGNED_UPDATE_MODE_UPDATE will make this call unsafe and might damage the camera [out] error If non-null, receives any error that occurs during this call, otherwise, errors are ignored
| void rs2_write_calibration | ( | const rs2_device * | device, |
| rs2_error ** | e | ||
| ) |