|
| void | AllocateMeasModelIExt (const vector< unsigned int > &meas_dimensions) |
| | Function to allocate memory needed during the measurement update,. More...
|
| |
| void | AllocateMeasModelIExt (const unsigned int &meas_dimensions) |
| | Function to allocate memory needed during the measurement update. More...
|
| |
| | IteratedExtendedKalmanFilter (Gaussian *prior, unsigned int nr_it=1, InnovationCheck *innov=NULL) |
| |
| virtual | ~IteratedExtendedKalmanFilter () |
| | Destructor. More...
|
| |
| void | AllocateMeasModel (const vector< unsigned int > &meas_dimensions) |
| | Function to allocate memory needed during the measurement update,. More...
|
| |
| void | AllocateMeasModel (const unsigned int &meas_dimensions) |
| | Function to allocate memory needed during the measurement update. More...
|
| |
| | KalmanFilter (Gaussian *prior) |
| | Constructor. More...
|
| |
| virtual Gaussian * | PostGet () |
| | Get Posterior density. More...
|
| |
| virtual | ~KalmanFilter () |
| | Destructor. More...
|
| |
| | Filter (Pdf< MatrixWrapper::ColumnVector > *prior) |
| | Constructor. More...
|
| |
| | Filter (const Filter< MatrixWrapper::ColumnVector, MatrixWrapper::ColumnVector > &filt) |
| | copy constructor More...
|
| |
| virtual void | Reset (Pdf< MatrixWrapper::ColumnVector > *prior) |
| | Reset Filter. More...
|
| |
| int | TimeStepGet () const |
| | Get current time. More...
|
| |
| virtual bool | Update (SystemModel< MatrixWrapper::ColumnVector > *const sysmodel, const MatrixWrapper::ColumnVector &u, MeasurementModel< MatrixWrapper::ColumnVector, MatrixWrapper::ColumnVector > *const measmodel, const MatrixWrapper::ColumnVector &z, const MatrixWrapper::ColumnVector &s) |
| | Full Update (system with inputs/sensing params) More...
|
| |
| virtual bool | Update (SystemModel< MatrixWrapper::ColumnVector > *const sysmodel, MeasurementModel< MatrixWrapper::ColumnVector, MatrixWrapper::ColumnVector > *const measmodel, const MatrixWrapper::ColumnVector &z, const MatrixWrapper::ColumnVector &s) |
| | Full Update (system without inputs, with sensing params) More...
|
| |
| virtual bool | Update (SystemModel< MatrixWrapper::ColumnVector > *const sysmodel, MeasurementModel< MatrixWrapper::ColumnVector, MatrixWrapper::ColumnVector > *const measmodel, const MatrixWrapper::ColumnVector &z) |
| | Full Update (system without inputs/sensing params) More...
|
| |
| virtual bool | Update (SystemModel< MatrixWrapper::ColumnVector > *const sysmodel, const MatrixWrapper::ColumnVector &u, MeasurementModel< MatrixWrapper::ColumnVector, MatrixWrapper::ColumnVector > *const measmodel, const MatrixWrapper::ColumnVector &z) |
| | Full Update (system with inputs, without sensing params) More...
|
| |
| virtual bool | Update (SystemModel< MatrixWrapper::ColumnVector > *const sysmodel, const MatrixWrapper::ColumnVector &u) |
| | System Update (system with inputs) More...
|
| |
| virtual bool | Update (SystemModel< MatrixWrapper::ColumnVector > *const sysmodel) |
| | System Update (system without inputs) More...
|
| |
| virtual bool | Update (MeasurementModel< MatrixWrapper::ColumnVector, MatrixWrapper::ColumnVector > *const measmodel, const MatrixWrapper::ColumnVector &z, const MatrixWrapper::ColumnVector &s) |
| | Measurement Update (system with "sensing params") More...
|
| |
| virtual bool | Update (MeasurementModel< MatrixWrapper::ColumnVector, MatrixWrapper::ColumnVector > *const measmodel, const MatrixWrapper::ColumnVector &z) |
| | Measurement Update (system without "sensing params") More...
|
| |
| virtual | ~Filter () |
| | destructor More...
|
| |
|
| virtual void | MeasUpdate (MeasurementModel< MatrixWrapper::ColumnVector, MatrixWrapper::ColumnVector > *const measmodel, const MatrixWrapper::ColumnVector &z, const MatrixWrapper::ColumnVector &s) |
| | Measurement Update (overloaded) More...
|
| |
| virtual void | SysUpdate (SystemModel< MatrixWrapper::ColumnVector > *const sysmodel, const MatrixWrapper::ColumnVector &u) |
| | System Update. More...
|
| |
| void | CalculateMeasUpdate (const MatrixWrapper::ColumnVector &z, const MatrixWrapper::ColumnVector &Z, const MatrixWrapper::Matrix &H, const MatrixWrapper::SymmetricMatrix &R) |
| |
| void | CalculateSysUpdate (const MatrixWrapper::ColumnVector &J, const MatrixWrapper::Matrix &F, const MatrixWrapper::SymmetricMatrix &Q) |
| |
| void | PostMuSet (const MatrixWrapper::ColumnVector &c) |
| | Set expected value of posterior estimate. More...
|
| |
| void | PostSigmaSet (const MatrixWrapper::SymmetricMatrix &s) |
| | Set covariance of posterior estimate. More...
|
| |
| virtual bool | UpdateInternal (SystemModel< MatrixWrapper::ColumnVector > *const sysmodel, const MatrixWrapper::ColumnVector &u, MeasurementModel< MatrixWrapper::ColumnVector, MatrixWrapper::ColumnVector > *const measmodel, const MatrixWrapper::ColumnVector &z, const MatrixWrapper::ColumnVector &s) |
| | Actual implementation of Update, varies along filters. More...
|
| |
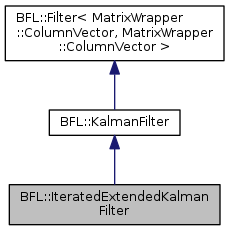
This is a class implementing the Kalman Filter (KF) class for Iterated Extended Kalman Filters.
The System- and MeasurementUpdate equasions are not linear, and will be approximated by local linearisations.
- See also
- KalmanFilter
Definition at line 40 of file iteratedextendedkalmanfilter.h.
| void BFL::IteratedExtendedKalmanFilter::MeasUpdate |
( |
MeasurementModel< MatrixWrapper::ColumnVector, MatrixWrapper::ColumnVector > *const |
measmodel, |
|
|
const MatrixWrapper::ColumnVector & |
z, |
|
|
const MatrixWrapper::ColumnVector & |
s |
|
) |
| |
|
protectedvirtual |
Measurement Update (overloaded)
Update the filter's Posterior density using the sensor measurements, an input and the measurement model. This method is used when the measurements depend on the inputs too (doesn't happen very often, does it?) BEWARE: the first time the measurment update is called with a new size of measurement, new allocations are done
- Parameters
-
| measmodel | pointer to the measurement model the filter should use |
| z | sensor measurement |
| s | input to the system (must be of the same type as u for now, since this was not yet implemented in ConditionalPdf |
Implements BFL::KalmanFilter.
Definition at line 99 of file iteratedextendedkalmanfilter.cpp.
 Public Member Functions inherited from BFL::KalmanFilter
Public Member Functions inherited from BFL::KalmanFilter