#include <VisualizationBase.hpp>
Public Member Functions | |
| virtual bool | initialize ()=0 |
| bool | isActive () const |
| virtual bool | readParameters (XmlRpc::XmlRpcValue &config) |
| VisualizationBase (ros::NodeHandle &nodeHandle, const std::string &name) | |
| virtual bool | visualize (const grid_map::GridMap &map)=0 |
| virtual | ~VisualizationBase () |
Protected Member Functions | |
| bool | getParam (const std::string &name, std::string &value) |
| bool | getParam (const std::string &name, double &value) |
| bool | getParam (const std::string &name, float &value) |
| bool | getParam (const std::string &name, int &value) |
| bool | getParam (const std::string &name, bool &value) |
Protected Attributes | |
| std::string | name_ |
| Name of the visualization. | |
| ros::NodeHandle & | nodeHandle_ |
| ROS nodehandle. | |
| StringMap | parameters_ |
| Storage of the parsed XML parameters. | |
| ros::Publisher | publisher_ |
| ROS publisher of the occupancy grid. | |
Detailed Description
Definition at line 20 of file VisualizationBase.hpp.
Constructor & Destructor Documentation
| grid_map_visualization::VisualizationBase::VisualizationBase | ( | ros::NodeHandle & | nodeHandle, |
| const std::string & | name | ||
| ) |
Constructor.
- Parameters:
-
nodeHandle the ROS node handle. name the name of the visualization.
Definition at line 13 of file VisualizationBase.cpp.
Destructor.
Definition at line 19 of file VisualizationBase.cpp.
Member Function Documentation
| bool grid_map_visualization::VisualizationBase::getParam | ( | const std::string & | name, |
| std::string & | value | ||
| ) | [protected] |
Get a visualization parameter as a string.
- Parameters:
-
[in] name the name of the parameter [out] value the string to set with the value.
- Returns:
- true if parameter was found, false otherwise.
Definition at line 53 of file VisualizationBase.cpp.
| bool grid_map_visualization::VisualizationBase::getParam | ( | const std::string & | name, |
| double & | value | ||
| ) | [protected] |
Get a visualization parameter as a double.
- Parameters:
-
[in] name the name of the parameter [out] value the double to set with the value.
- Returns:
- true if parameter was found, false otherwise.
Definition at line 62 of file VisualizationBase.cpp.
| bool grid_map_visualization::VisualizationBase::getParam | ( | const std::string & | name, |
| float & | value | ||
| ) | [protected] |
Get a visualization parameter as a float.
- Parameters:
-
[in] name the name of the parameter [out] value the float to set with the value.
- Returns:
- true if parameter was found, false otherwise.
Definition at line 73 of file VisualizationBase.cpp.
| bool grid_map_visualization::VisualizationBase::getParam | ( | const std::string & | name, |
| int & | value | ||
| ) | [protected] |
Get a visualization parameter as an integer.
- Parameters:
-
[in] name the name of the parameter [out] value the int to set with the value.
- Returns:
- true if parameter was found, false otherwise.
Definition at line 90 of file VisualizationBase.cpp.
| bool grid_map_visualization::VisualizationBase::getParam | ( | const std::string & | name, |
| bool & | value | ||
| ) | [protected] |
Get a visualization parameter as a boolean.
- Parameters:
-
[in] name the name of the parameter [out] value the boolean to set with the value.
- Returns:
- true if parameter was found, false otherwise.
Definition at line 81 of file VisualizationBase.cpp.
| virtual bool grid_map_visualization::VisualizationBase::initialize | ( | ) | [pure virtual] |
Initialization.
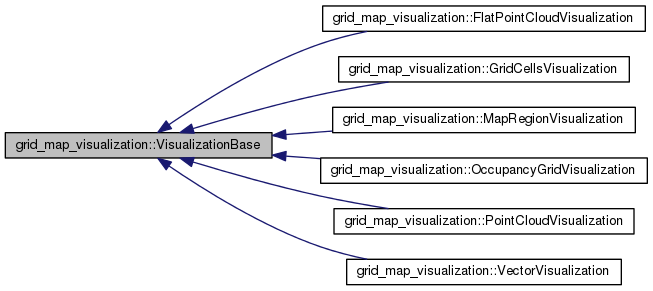
Implemented in grid_map_visualization::VectorVisualization, grid_map_visualization::MapRegionVisualization, grid_map_visualization::FlatPointCloudVisualization, grid_map_visualization::PointCloudVisualization, grid_map_visualization::GridCellsVisualization, and grid_map_visualization::OccupancyGridVisualization.
| bool grid_map_visualization::VisualizationBase::isActive | ( | ) | const |
Checks if visualization is active (if somebody has actually subscribed).
- Returns:
- true if active, false otherwise.
Definition at line 23 of file VisualizationBase.cpp.
| bool grid_map_visualization::VisualizationBase::readParameters | ( | XmlRpc::XmlRpcValue & | config | ) | [virtual] |
Read parameters from ROS.
- Parameters:
-
config the parameters as XML.
- Returns:
- true if successful.
Reimplemented in grid_map_visualization::VectorVisualization, grid_map_visualization::MapRegionVisualization, grid_map_visualization::FlatPointCloudVisualization, grid_map_visualization::PointCloudVisualization, grid_map_visualization::GridCellsVisualization, and grid_map_visualization::OccupancyGridVisualization.
Definition at line 29 of file VisualizationBase.cpp.
| virtual bool grid_map_visualization::VisualizationBase::visualize | ( | const grid_map::GridMap & | map | ) | [pure virtual] |
Generates the visualization.
- Parameters:
-
map the grid map to visualize.
- Returns:
- true if successful.
Implemented in grid_map_visualization::VectorVisualization, grid_map_visualization::MapRegionVisualization, grid_map_visualization::FlatPointCloudVisualization, grid_map_visualization::PointCloudVisualization, grid_map_visualization::GridCellsVisualization, and grid_map_visualization::OccupancyGridVisualization.
Member Data Documentation
std::string grid_map_visualization::VisualizationBase::name_ [protected] |
Name of the visualization.
Definition at line 107 of file VisualizationBase.hpp.
ros::NodeHandle& grid_map_visualization::VisualizationBase::nodeHandle_ [protected] |
ROS nodehandle.
Definition at line 104 of file VisualizationBase.hpp.
Storage of the parsed XML parameters.
Definition at line 110 of file VisualizationBase.hpp.
ros::Publisher grid_map_visualization::VisualizationBase::publisher_ [protected] |
ROS publisher of the occupancy grid.
Definition at line 113 of file VisualizationBase.hpp.
The documentation for this class was generated from the following files: