#include <constraint_base.h>
Public Member Functions | |
| virtual void | calculate ()=0 |
| ConstraintBase (PRIO prio, T_PARAMS params, CallbackDataMediator &cbdm) | |
| virtual Task_t | createTask () |
| virtual double | getActivationGain () const =0 |
| virtual double | getDerivativeValue () const |
| virtual Eigen::VectorXd | getPartialValues () const |
| virtual double | getPredictionValue () const |
| virtual double | getSelfMotionMagnitude (const Eigen::MatrixXd &particular_solution, const Eigen::MatrixXd &homogeneous_solution) const =0 |
| virtual ConstraintState | getState () const |
| virtual Eigen::VectorXd | getTaskDerivatives () const |
| virtual std::string | getTaskId () const =0 |
| virtual Eigen::MatrixXd | getTaskJacobian () const |
| virtual double | getValue () const |
| virtual void | update (const JointStates &joint_states, const KDL::JntArrayVel &joints_prediction, const Matrix6Xd_t &jacobian_data) |
| virtual | ~ConstraintBase () |
Protected Member Functions | |
| virtual double | getCriticalValue () const |
Protected Attributes | |
| CallbackDataMediator & | callback_data_mediator_ |
| T_PARAMS | constraint_params_ |
| double | derivative_value_ |
| Matrix6Xd_t | jacobian_data_ |
| KDL::JntArrayVel | jnts_prediction_ |
| JointStates | joint_states_ |
| ros::Time | last_pred_time_ |
| ros::Time | last_time_ |
| double | last_value_ |
| uint32_t | member_inst_cnt_ |
| Eigen::VectorXd | partial_values_ |
| double | prediction_value_ |
| ConstraintState | state_ |
| double | value_ |
Static Protected Attributes | |
| static uint32_t | instance_ctr_ = 0 |
Detailed Description
template<typename T_PARAMS, typename PRIO = uint32_t>
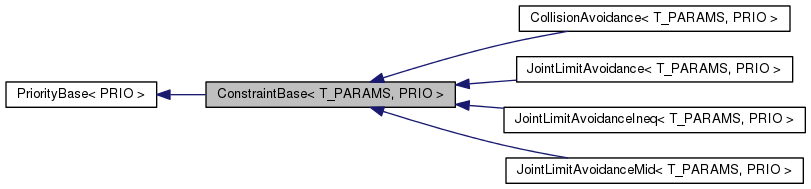
class ConstraintBase< T_PARAMS, PRIO >
Base class for all derived constraints. Used to represent a common data structure for all concrete constraints.
- Template Parameters:
-
T_PARAMS A specific constraint parameter class. PRIO See base class.
Definition at line 111 of file constraint_base.h.
Constructor & Destructor Documentation
| ConstraintBase< T_PARAMS, PRIO >::ConstraintBase | ( | PRIO | prio, |
| T_PARAMS | params, | ||
| CallbackDataMediator & | cbdm | ||
| ) | [inline] |
- Parameters:
-
prio A priority value / object. q The joint states. params The parameters for the constraint to parameterize the calculation of the cost function values.
Definition at line 119 of file constraint_base.h.
| virtual ConstraintBase< T_PARAMS, PRIO >::~ConstraintBase | ( | ) | [inline, virtual] |
Definition at line 135 of file constraint_base.h.
Member Function Documentation
| virtual void ConstraintBase< T_PARAMS, PRIO >::calculate | ( | ) | [pure virtual] |
| virtual Task_t ConstraintBase< T_PARAMS, PRIO >::createTask | ( | ) | [inline, virtual] |
Implements PriorityBase< PRIO >.
Definition at line 138 of file constraint_base.h.
| virtual double ConstraintBase< T_PARAMS, PRIO >::getActivationGain | ( | ) | const [pure virtual] |
| virtual double ConstraintBase< T_PARAMS, PRIO >::getCriticalValue | ( | ) | const [inline, protected, virtual] |
Implements PriorityBase< PRIO >.
Reimplemented in CollisionAvoidance< T_PARAMS, PRIO >.
Definition at line 223 of file constraint_base.h.
| virtual double ConstraintBase< T_PARAMS, PRIO >::getDerivativeValue | ( | ) | const [inline, virtual] |
Implements PriorityBase< PRIO >.
Definition at line 184 of file constraint_base.h.
| virtual Eigen::VectorXd ConstraintBase< T_PARAMS, PRIO >::getPartialValues | ( | ) | const [inline, virtual] |
Implements PriorityBase< PRIO >.
Definition at line 189 of file constraint_base.h.
| virtual double ConstraintBase< T_PARAMS, PRIO >::getPredictionValue | ( | ) | const [inline, virtual] |
Implements PriorityBase< PRIO >.
Definition at line 194 of file constraint_base.h.
| virtual double ConstraintBase< T_PARAMS, PRIO >::getSelfMotionMagnitude | ( | const Eigen::MatrixXd & | particular_solution, |
| const Eigen::MatrixXd & | homogeneous_solution | ||
| ) | const [pure virtual] |
| virtual ConstraintState ConstraintBase< T_PARAMS, PRIO >::getState | ( | ) | const [inline, virtual] |
Implements PriorityBase< PRIO >.
Definition at line 149 of file constraint_base.h.
| virtual Eigen::VectorXd ConstraintBase< T_PARAMS, PRIO >::getTaskDerivatives | ( | ) | const [inline, virtual] |
Implements PriorityBase< PRIO >.
Reimplemented in JointLimitAvoidanceIneq< T_PARAMS, PRIO >, JointLimitAvoidance< T_PARAMS, PRIO >, and CollisionAvoidance< T_PARAMS, PRIO >.
Definition at line 159 of file constraint_base.h.
| virtual std::string ConstraintBase< T_PARAMS, PRIO >::getTaskId | ( | ) | const [pure virtual] |
| virtual Eigen::MatrixXd ConstraintBase< T_PARAMS, PRIO >::getTaskJacobian | ( | ) | const [inline, virtual] |
Implements PriorityBase< PRIO >.
Reimplemented in JointLimitAvoidanceIneq< T_PARAMS, PRIO >, JointLimitAvoidance< T_PARAMS, PRIO >, and CollisionAvoidance< T_PARAMS, PRIO >.
Definition at line 154 of file constraint_base.h.
| virtual double ConstraintBase< T_PARAMS, PRIO >::getValue | ( | ) | const [inline, virtual] |
Implements PriorityBase< PRIO >.
Definition at line 179 of file constraint_base.h.
| virtual void ConstraintBase< T_PARAMS, PRIO >::update | ( | const JointStates & | joint_states, |
| const KDL::JntArrayVel & | joints_prediction, | ||
| const Matrix6Xd_t & | jacobian_data | ||
| ) | [inline, virtual] |
Implements PriorityBase< PRIO >.
Definition at line 164 of file constraint_base.h.
Member Data Documentation
CallbackDataMediator& ConstraintBase< T_PARAMS, PRIO >::callback_data_mediator_ [protected] |
Definition at line 206 of file constraint_base.h.
T_PARAMS ConstraintBase< T_PARAMS, PRIO >::constraint_params_ [protected] |
Definition at line 205 of file constraint_base.h.
double ConstraintBase< T_PARAMS, PRIO >::derivative_value_ [protected] |
Definition at line 213 of file constraint_base.h.
uint32_t ConstraintBase< T_PARAMS, PRIO >::instance_ctr_ = 0 [static, protected] |
Definition at line 221 of file constraint_base.h.
Matrix6Xd_t ConstraintBase< T_PARAMS, PRIO >::jacobian_data_ [protected] |
Definition at line 210 of file constraint_base.h.
KDL::JntArrayVel ConstraintBase< T_PARAMS, PRIO >::jnts_prediction_ [protected] |
Definition at line 209 of file constraint_base.h.
JointStates ConstraintBase< T_PARAMS, PRIO >::joint_states_ [protected] |
Definition at line 208 of file constraint_base.h.
ros::Time ConstraintBase< T_PARAMS, PRIO >::last_pred_time_ [protected] |
Definition at line 218 of file constraint_base.h.
ros::Time ConstraintBase< T_PARAMS, PRIO >::last_time_ [protected] |
Definition at line 217 of file constraint_base.h.
double ConstraintBase< T_PARAMS, PRIO >::last_value_ [protected] |
Definition at line 216 of file constraint_base.h.
uint32_t ConstraintBase< T_PARAMS, PRIO >::member_inst_cnt_ [protected] |
Definition at line 220 of file constraint_base.h.
Eigen::VectorXd ConstraintBase< T_PARAMS, PRIO >::partial_values_ [protected] |
Definition at line 214 of file constraint_base.h.
double ConstraintBase< T_PARAMS, PRIO >::prediction_value_ [protected] |
Definition at line 215 of file constraint_base.h.
ConstraintState ConstraintBase< T_PARAMS, PRIO >::state_ [protected] |
Definition at line 204 of file constraint_base.h.
double ConstraintBase< T_PARAMS, PRIO >::value_ [protected] |
Definition at line 212 of file constraint_base.h.
The documentation for this class was generated from the following file: