#include <pcl/features/normal_3d.h>#include <pcl/pcl_base.h>#include <pcl/point_cloud.h>#include <pcl/point_types.h>#include <pcl/octree/octree.h>#include <pcl/octree/octree_pointcloud_adjacency.h>#include <pcl/search/search.h>#include <pcl/segmentation/boost.h>#include <pcl/common/time.h>
Include dependency graph for supervoxel_clustering.h:

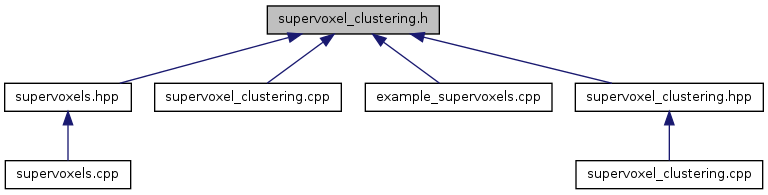
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | pcl::Supervoxel< PointT > |
| Supervoxel container class - stores a cluster extracted using supervoxel clustering. More... | |
| class | pcl::SupervoxelClustering< PointT > |
| Implements a supervoxel algorithm based on voxel structure, normals, and rgb values. More... | |
| class | pcl::SupervoxelClustering< PointT >::SupervoxelHelper |
| Internal storage class for supervoxels. More... | |
| class | pcl::SupervoxelClustering< PointT >::VoxelData |
| VoxelData is a structure used for storing data within a pcl::octree::OctreePointCloudAdjacencyContainer. More... | |
Namespaces | |
| namespace | pcl |
Defines | |
| #define | MAX_LABEL 16384 |
Define Documentation
| #define MAX_LABEL 16384 |
Definition at line 124 of file supervoxel_clustering.h.