Simulates the process to be controlled based on a dynamic model. More...
#include <process.hpp>
Detailed Description
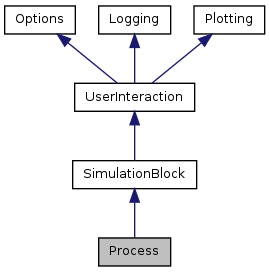
Simulates the process to be controlled based on a dynamic model.
The class Process is one of the two main building-blocks within the SimulationEnvironment and complements the Controller. It simulates the process to be controlled based on a dynamic model.
The Process simulates the dynamic model based on the controls, and optionally parameters, passed. Before using these inputs, they can be transformed by an Actuator. After the simulation, the outputs can be transformed by a Sensor. That way, actuator/sensor delays or noise can be introduced to yield more realistic simulation results. Moreover, in case the dynamic model depends on Disturbances, their values are specified by the user by assigning the processDisturbance member.
Definition at line 71 of file process.hpp.
Constructor & Destructor Documentation
Default constructor.
Definition at line 50 of file process.cpp.
| Process::Process | ( | const DynamicSystem & | _dynamicSystem, |
| IntegratorType | _integratorType = INT_UNKNOWN |
||
| ) |
Constructor which takes the dynamic system and the type of the integrator used for simulation.
- Parameters:
-
[in] _dynamicSystem Dynamic system to be used for simulation. [in] _integratorType Type of integrator to be used for simulation.
- Note:
- This constructor takes the dynamic system of the first model stage, multi-stage models can be simulated by adding further dynamic systems (however, this feature is not functional yet!).
Definition at line 71 of file process.cpp.
| Process::Process | ( | const Process & | rhs | ) |
Copy constructor (deep copy).
- Parameters:
-
[in] rhs Right-hand side object.
Definition at line 100 of file process.cpp.
| Process::~Process | ( | ) | [virtual] |
Destructor.
Definition at line 144 of file process.cpp.
Member Function Documentation
| returnValue Process::addDynamicSystemStage | ( | const DynamicSystem & | _dynamicSystem, |
| IntegratorType | _integratorType = INT_UNKNOWN |
||
| ) |
Assigns new dynamic system stage to be used for simulation.
- Parameters:
-
[in] _dynamicSystem Dynamic system to be used for simulation. [in] _integratorType Type of integrator to be used for simulation.
- Note:
- Multi-stage models are not yet supported!
- Returns:
- SUCCESSFUL_RETURN,
RET_NOT_YET_IMPLEMENTED
Definition at line 238 of file process.cpp.
| returnValue Process::addStage | ( | const DynamicSystem & | dynamicSystem_, |
| const Grid & | stageIntervals, | ||
| const IntegratorType & | integratorType_ = INT_UNKNOWN |
||
| ) | [protected] |
Internally adds a new dynamic system stage to be used for simulation.
- Parameters:
-
[in] _dynamicSystem Dynamic system to be used for simulation. [in] stageIntervals Dummy grid. [in] _integratorType Type of integrator to be used for simulation.
- Note:
- Multi-stage models are not yet supported!
- Returns:
- SUCCESSFUL_RETURN
Definition at line 778 of file process.cpp.
| returnValue Process::calculateOutput | ( | OutputFcn & | _outputFcn, |
| const VariablesGrid * | _x, | ||
| const DVector & | _xComponents, | ||
| const VariablesGrid * | _xa, | ||
| const VariablesGrid * | _p, | ||
| const VariablesGrid * | _u, | ||
| const VariablesGrid * | _w, | ||
| VariablesGrid * | _output | ||
| ) | const [protected] |
Calculates the process output based on the simulated states by evaluating the output function of the dynamic system.
- Parameters:
-
[in] _x Differential states. [in] _xComponents Global components of differential states actually used. [in] _xa Algebraic states. [in] _p Parameters. [in] _u Controls. [in] _w Disturbances. [in] _p Parameters. [out] _output Time-varying process output.
- Returns:
- SUCCESSFUL_RETURN,
RET_INVALID_ARGUMENTS
Definition at line 992 of file process.cpp.
| returnValue Process::checkInputConsistency | ( | const VariablesGrid & | _u, |
| const VariablesGrid & | _p | ||
| ) | const [protected] |
Checks consistency of the given inputs (dimensions, time grids etc.).
- Parameters:
-
[in] _u Time-varying controls. [in] _p Time-varying parameters.
- Returns:
- SUCCESSFUL_RETURN,
RET_CONTROL_DIMENSION_MISMATCH,
RET_PARAMETER_DIMENSION_MISMATCH,
RET_INVALID_ARGUMENTS
Definition at line 957 of file process.cpp.
| returnValue Process::clear | ( | ) | [protected] |
Clears all dynamic systems and all members.
- Returns:
- SUCCESSFUL_RETURN
Definition at line 797 of file process.cpp.
| uint Process::getNP | ( | uint | stageIdx = 0 | ) | const [inline] |
Returns number of parameter signals (at given stage) expected by the process.
- Parameters:
-
[in] stageIdx Index of stage.
- Returns:
- Number of parameter signals (at given stage)
| uint Process::getNU | ( | uint | stageIdx = 0 | ) | const [inline] |
Returns number of control signals (at given stage) expected by the process.
- Parameters:
-
[in] stageIdx Index of stage.
- Returns:
- Number of control signals (at given stage)
| uint Process::getNumStages | ( | ) | const [inline] |
Returns number of stages of the dynamic model.
- Returns:
- Number of stages of the dynamic model
| uint Process::getNW | ( | uint | stageIdx = 0 | ) | const [inline] |
Returns number of disturbances (at given stage) used within the process.
- Parameters:
-
[in] stageIdx Index of stage.
- Returns:
- Number of disturbances (at given stage)
| uint Process::getNX | ( | uint | stageIdx = 0 | ) | const [inline, protected] |
Returns number of differential states (at given stage) of the dynamic model.
- Parameters:
-
[in] stageIdx Index of stage.
- Returns:
- Number of differential states
| uint Process::getNXA | ( | uint | stageIdx = 0 | ) | const [inline, protected] |
Returns number of algebraic states (at given stage) of the dynamic model.
- Parameters:
-
[in] stageIdx Index of stage.
- Returns:
- Number of algebraic states
| uint Process::getNY | ( | uint | stageIdx = 0 | ) | const [inline] |
Returns number of process outputs (at given stage).
- Parameters:
-
[in] stageIdx Index of stage.
- Returns:
- Number of process outputs (at given stage)
| returnValue Process::getY | ( | VariablesGrid & | _y | ) | const [inline] |
| BooleanType Process::hasActuator | ( | ) | const [inline] |
Returns whether process comprises an actuator.
- Returns:
- BT_TRUE iff process comprises an actuator,
BT_FALSE otherwise
| BooleanType Process::hasProcessDisturbance | ( | ) | const [inline] |
Returns whether process comprises a process disturbance.
- Returns:
- BT_TRUE iff process comprises a process disturbance,
BT_FALSE otherwise
| BooleanType Process::hasSensor | ( | ) | const [inline] |
Returns whether process comprises a sensor.
- Returns:
- BT_TRUE iff process comprises a sensor,
BT_FALSE otherwise
| returnValue Process::init | ( | double | _startTime = 0.0, |
| const DVector & | _xStart = emptyConstVector, |
||
| const DVector & | _uStart = emptyConstVector, |
||
| const DVector & | _pStart = emptyConstVector |
||
| ) | [virtual] |
Initializes the simulation with given start values and performs a number of consistency checks.
- Parameters:
-
[in] _startTime Start time of simulation. [in] _xStart Initial value for differential states. [in] _uStart Initial value for controls. [in] _pStart Initial value for parameters.
- Returns:
- SUCCESSFUL_RETURN,
RET_PROCESS_INIT_FAILED,
RET_NO_DYNAMICSYSTEM_SPECIFIED,
RET_DIFFERENTIAL_STATE_DIMENSION_MISMATCH,
RET_ALGEBRAIC_STATE_DIMENSION_MISMATCH,
RET_CONTROL_DIMENSION_MISMATCH,
RET_PARAMETER_DIMENSION_MISMATCH,
RET_DISTURBANCE_DIMENSION_MISMATCH,
RET_WRONG_DISTURBANCE_HORIZON,
RET_INCOMPATIBLE_ACTUATOR_SAMPLING_TIME,
RET_INCOMPATIBLE_SENSOR_SAMPLING_TIME
Definition at line 353 of file process.cpp.
| returnValue Process::initializeAlgebraicStates | ( | const DVector & | _xaStart | ) |
Initializes simulation with given start value for algebraic states.
- Parameters:
-
[in] _xaStart Initial value for algebraic states.
- Returns:
- SUCCESSFUL_RETURN
Definition at line 345 of file process.cpp.
| returnValue Process::initializeStartValues | ( | const DVector & | _xStart, |
| const DVector & | _xaStart = emptyConstVector |
||
| ) |
Initializes simulation with given start values.
- Parameters:
-
[in] _xStart Initial value for differential states. [in] _xaStart Initial value for algebraic states.
- Returns:
- SUCCESSFUL_RETURN
Definition at line 330 of file process.cpp.
| BooleanType Process::isContinuous | ( | uint | stageIdx = 0 | ) | const [inline] |
Returns whether dynamic model (at given stage) is continuous in time.
- Parameters:
-
[in] stageIdx Index of stage.
- Returns:
- BT_TRUE iff dynamic model is continuous in time,
BT_FALSE otherwise
| BooleanType Process::isDAE | ( | uint | stageIdx = 0 | ) | const [inline] |
Returns whether dynamic model (at given stage) is a DAE.
- Parameters:
-
[in] stageIdx Index of stage.
- Returns:
- BT_TRUE iff dynamic model is a DAE,
BT_FALSE otherwise
| BooleanType Process::isDiscretized | ( | uint | stageIdx = 0 | ) | const [inline] |
Returns whether dynamic model (at given stage) is discretized in time.
- Parameters:
-
[in] stageIdx Index of stage.
- Returns:
- BT_TRUE iff dynamic model is discretized in time,
BT_FALSE otherwise
| BooleanType Process::isODE | ( | uint | stageIdx = 0 | ) | const [inline] |
Returns whether dynamic model (at given stage) is an ODE.
- Parameters:
-
[in] stageIdx Index of stage.
- Returns:
- BT_TRUE iff dynamic model is an ODE,
BT_FALSE otherwise
Assignment operator (deep copy).
- Parameters:
-
[in] rhs Right-hand side object.
Definition at line 150 of file process.cpp.
| returnValue Process::projectToComponents | ( | const VariablesGrid & | _x, |
| const DVector & | _xComponents, | ||
| VariablesGrid & | _output | ||
| ) | const [protected] |
Projects differential states to global components actually used.
- Parameters:
-
[in] _x Differential states. [in] _xComponents Global components of differential states actually used. [out] _output Projected differential states.
- Returns:
- SUCCESSFUL_RETURN
Definition at line 1028 of file process.cpp.
| returnValue Process::replot | ( | PlotFrequency | _frequency = PLOT_IN_ANY_CASE | ) | [virtual] |
Customized function for plotting process variables.
- Parameters:
-
[in] _frequency Frequency determining at which time instants the window is to be plotted.
- Returns:
- SUCCESSFUL_RETURN
Reimplemented from Plotting.
Definition at line 678 of file process.cpp.
| returnValue Process::run | ( | const VariablesGrid & | _u, |
| const VariablesGrid & | _p = emptyVariablesGrid |
||
| ) | [virtual] |
Initializes simulation and performs one step based on given inputs.
- Parameters:
-
[in] _u Time-varying controls. [in] _p Time-varying parameters.
- Returns:
- SUCCESSFUL_RETURN,
RET_BLOCK_NOT_READY,
RET_PROCESS_STEP_FAILED,
RET_PROCESS_STEP_FAILED_DISTURBANCE,
RET_INVALID_ARGUMENTS
Definition at line 632 of file process.cpp.
| returnValue Process::run | ( | const VariablesGrid & | _u, |
| const DVector & | _p | ||
| ) | [virtual] |
Initializes simulation and performs one step based on given inputs.
- Parameters:
-
[in] _u Time-varying controls. [in] _p Time-constant parameters.
- Returns:
- SUCCESSFUL_RETURN,
RET_BLOCK_NOT_READY,
RET_PROCESS_STEP_FAILED,
RET_PROCESS_STEP_FAILED_DISTURBANCE,
RET_INVALID_ARGUMENTS
Definition at line 647 of file process.cpp.
| returnValue Process::run | ( | double | startTime, |
| double | endTime, | ||
| const DVector & | _u, | ||
| const DVector & | _p = emptyConstVector |
||
| ) | [virtual] |
Initializes simulation and performs one step based on given inputs.
- Parameters:
-
[in] startTime Start time of simulation step. [in] endTime End time of simulation step. [in] _u Time-constant controls. [in] _p Time-constant parameters.
- Returns:
- SUCCESSFUL_RETURN,
RET_BLOCK_NOT_READY,
RET_PROCESS_STEP_FAILED,
RET_PROCESS_STEP_FAILED_DISTURBANCE,
RET_INVALID_ARGUMENTS
Definition at line 659 of file process.cpp.
| returnValue Process::setActuator | ( | const Actuator & | _actuator | ) |
Assigns new actuator to be used for simulation.
- Parameters:
-
[in] _actuator New actuator.
- Returns:
- SUCCESSFUL_RETURN
Definition at line 254 of file process.cpp.
| returnValue Process::setDynamicSystem | ( | const DynamicSystem & | _dynamicSystem, |
| IntegratorType | _integratorType = INT_UNKNOWN |
||
| ) |
Assigns new dynamic system to be used for simulation. All previously assigned dynamic systems will be deleted.
- Parameters:
-
[in] _dynamicSystem Dynamic system to be used for simulation. [in] _integratorType Type of integrator to be used for simulation.
- Returns:
- SUCCESSFUL_RETURN
Definition at line 204 of file process.cpp.
| returnValue Process::setProcessDisturbance | ( | const Curve & | _processDisturbance | ) |
Assigns new process disturbance to be used for simulation.
- Parameters:
-
[in] _processDisturbance New sensor.
- Returns:
- SUCCESSFUL_RETURN
Definition at line 289 of file process.cpp.
| returnValue Process::setProcessDisturbance | ( | const VariablesGrid & | _processDisturbance | ) |
Assigns new process disturbance to be used for simulation.
- Parameters:
-
[in] _processDisturbance New sensor.
- Returns:
- SUCCESSFUL_RETURN,
RET_INVALID_ARGUMENTS
Definition at line 303 of file process.cpp.
| returnValue Process::setProcessDisturbance | ( | const char * | _processDisturbance | ) |
Assigns new process disturbance to be used for simulation.
- Parameters:
-
[in] _processDisturbance New sensor.
- Returns:
- SUCCESSFUL_RETURN,
RET_FILE_CAN_NOT_BE_OPENED
Definition at line 316 of file process.cpp.
| returnValue Process::setSensor | ( | const Sensor & | _sensor | ) |
Assigns new sensor to be used for simulation.
- Parameters:
-
[in] _sensor New sensor.
- Returns:
- SUCCESSFUL_RETURN
Definition at line 271 of file process.cpp.
| returnValue Process::setupLogging | ( | ) | [protected, virtual] |
Sets-up default logging information.
- Returns:
- SUCCESSFUL_RETURN
Reimplemented from Logging.
Definition at line 745 of file process.cpp.
| returnValue Process::setupOptions | ( | ) | [protected, virtual] |
Sets-up default options.
- Returns:
- SUCCESSFUL_RETURN
Reimplemented from Options.
Definition at line 711 of file process.cpp.
| returnValue Process::simulate | ( | const VariablesGrid & | _u, |
| const VariablesGrid & | _p, | ||
| const VariablesGrid & | _w | ||
| ) | [protected] |
Actually calls the integrator for performing a simulation. All simulated results are logged internally.
- Parameters:
-
[in] _u Time-varying controls. [in] _p Time-varying parameters. [in] _w Time-varying disturbances.
- Returns:
- SUCCESSFUL_RETURN
Definition at line 827 of file process.cpp.
| returnValue Process::step | ( | const VariablesGrid & | _u, |
| const VariablesGrid & | _p = emptyVariablesGrid |
||
| ) | [virtual] |
Performs one step of the simulation based on given inputs.
- Parameters:
-
[in] _u Time-varying controls. [in] _p Time-varying parameters.
- Returns:
- SUCCESSFUL_RETURN,
RET_BLOCK_NOT_READY,
RET_PROCESS_STEP_FAILED,
RET_PROCESS_STEP_FAILED_DISTURBANCE,
RET_INVALID_ARGUMENTS
Definition at line 508 of file process.cpp.
| returnValue Process::step | ( | const VariablesGrid & | _u, |
| const DVector & | _p | ||
| ) | [virtual] |
Performs one step of the simulation based on given inputs.
- Parameters:
-
[in] _u Time-varying controls. [in] _p Time-constant parameters.
- Returns:
- SUCCESSFUL_RETURN,
RET_BLOCK_NOT_READY,
RET_PROCESS_STEP_FAILED,
RET_PROCESS_STEP_FAILED_DISTURBANCE,
RET_INVALID_ARGUMENTS
Definition at line 601 of file process.cpp.
| returnValue Process::step | ( | double | startTime, |
| double | endTime, | ||
| const DVector & | _u, | ||
| const DVector & | _p = emptyConstVector |
||
| ) | [virtual] |
Performs one step of the simulation based on given inputs.
- Parameters:
-
[in] startTime Start time of simulation step. [in] endTime End time of simulation step. [in] _u Time-constant controls. [in] _p Time-constant parameters.
- Returns:
- SUCCESSFUL_RETURN,
RET_BLOCK_NOT_READY,
RET_PROCESS_STEP_FAILED,
RET_PROCESS_STEP_FAILED_DISTURBANCE,
RET_INVALID_ARGUMENTS
Definition at line 613 of file process.cpp.
Member Data Documentation
Actuator* Process::actuator [protected] |
Definition at line 610 of file process.hpp.
DynamicSystem** Process::dynamicSystems [protected] |
Dynamic system to be used for simulation.
Definition at line 606 of file process.hpp.
ShootingMethod* Process::integrationMethod [protected] |
Integration method to be used for simulation.
Definition at line 608 of file process.hpp.
IntegratorType Process::integratorType [protected] |
Definition at line 619 of file process.hpp.
double Process::lastTime [protected] |
Definition at line 616 of file process.hpp.
uint Process::nDynSys [protected] |
Number of dynamic systems.
Definition at line 605 of file process.hpp.
Curve* Process::processDisturbance [protected] |
Process disturbance block.
Definition at line 612 of file process.hpp.
Sensor* Process::sensor [protected] |
Definition at line 611 of file process.hpp.
DVector Process::x [protected] |
Definition at line 602 of file process.hpp.
DVector Process::xa [protected] |
Definition at line 603 of file process.hpp.
VariablesGrid Process::y [protected] |
Definition at line 614 of file process.hpp.
The documentation for this class was generated from the following files: