Allows to simulate the behaviour of sensors within the Process. More...
#include <sensor.hpp>
Detailed Description
Allows to simulate the behaviour of sensors within the Process.
The class Sensor allows to simulate the behaviour of sensors within the Process.
Definition at line 54 of file sensor.hpp.
Constructor & Destructor Documentation
Default constructor.
Definition at line 46 of file sensor.cpp.
| Sensor::Sensor | ( | uint | _nY, |
| double | _samplingTime = DEFAULT_SAMPLING_TIME |
||
| ) |
Constructor which takes the number of process outputs and the sampling time.
- Parameters:
-
[in] _nY Number of proces outputs. [in] _samplingTime Sampling time.
Definition at line 51 of file sensor.cpp.
| Sensor::Sensor | ( | const Sensor & | rhs | ) |
Copy constructor (deep copy).
- Parameters:
-
[in] rhs Right-hand side object.
Definition at line 58 of file sensor.cpp.
| Sensor::~Sensor | ( | ) | [virtual] |
Destructor.
Definition at line 63 of file sensor.cpp.
Member Function Documentation
| returnValue Sensor::addSensorNoise | ( | VariablesGrid & | _y | ) | const [protected] |
Adds noise to given signal.
- Parameters:
-
[in,out] _y Sensor signal to be noised.
- Returns:
- SUCCESSFUL_RETURN,
RET_GENERATING_NOISE_FAILED
Definition at line 292 of file sensor.cpp.
| returnValue Sensor::delaySensorOutput | ( | VariablesGrid & | _y | ) | [protected] |
Delays given signal according to the internal dead times.
- Parameters:
-
[in,out] _y Sensor signal to be delayed.
- Returns:
- SUCCESSFUL_RETURN,
RET_DELAYING_INPUTS_FAILED
Definition at line 224 of file sensor.cpp.
| returnValue Sensor::getDelayedOutputGrid | ( | const VariablesGrid & | _y, |
| VariablesGrid & | _yDelayed | ||
| ) | const [protected] |
Returns time grid for representing the given sensor signal in delayed form.
- Parameters:
-
[in] _y Sensor signal to be delayed. [out] _yDelayed Time grid for representing delayed sensor signal.
- Returns:
- SUCCESSFUL_RETURN
Definition at line 258 of file sensor.cpp.
| uint Sensor::getNY | ( | ) | const [inline] |
Returns number of sensor signal components.
- Returns:
- Number of sensor signal components.
| double Sensor::getOutputDeadTime | ( | uint | idx | ) | const [inline] |
Returns dead time of given component of the sensor signal.
- Parameters:
-
[in] idx Index of component.
- Returns:
- Dead time of given component
| DVector Sensor::getOutputDeadTimes | ( | ) | const [inline] |
Returns dead times of the sensor signal.
- Returns:
- Dead times of sensor signal
| Noise* Sensor::getOutputNoise | ( | uint | idx | ) | const [inline] |
Returns pointer to additive noise of given component of the sensor signal.
- Parameters:
-
[in] idx Index of component.
- Returns:
- Pointer to additive noise of given component
| returnValue Sensor::init | ( | double | _startTime = 0.0, |
| const DVector & | _startValue = emptyConstVector |
||
| ) | [virtual] |
Initializes all components of the sensor and the lastSignal member based on the given start information.
- Parameters:
-
[in] _startTime Start time. [in] _startValue Initial value of the sensor signal.
- Returns:
- SUCCESSFUL_RETURN
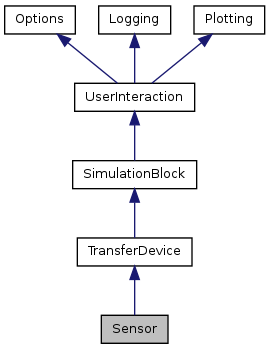
Reimplemented from TransferDevice.
Definition at line 180 of file sensor.cpp.
Assignment operator (deep copy).
- Parameters:
-
[in] rhs Right-hand side object.
Definition at line 68 of file sensor.cpp.
| returnValue Sensor::setOutputDeadTime | ( | uint | idx, |
| double | _deadTime | ||
| ) |
Assigns new dead time to given component of the sensor signal.
- Parameters:
-
[in] idx Index of component. [in] _deadTimes New dead time.
- Returns:
- SUCCESSFUL_RETURN,
RET_INVALID_ARGUMENTS,
RET_MEMBER_NOT_INITIALISED
Definition at line 160 of file sensor.cpp.
| returnValue Sensor::setOutputDeadTimes | ( | const DVector & | _deadTimes | ) |
Assigns new dead times to each component of the sensor signal.
- Parameters:
-
[in] _deadTimes New dead times.
- Returns:
- SUCCESSFUL_RETURN,
RET_INVALID_ARGUMENTS,
RET_MEMBER_NOT_INITIALISED
Definition at line 125 of file sensor.cpp.
| returnValue Sensor::setOutputDeadTimes | ( | double | _deadTime | ) |
Assigns new dead time to all components of the sensor signal.
- Parameters:
-
[in] _deadTime New dead time.
- Returns:
- SUCCESSFUL_RETURN,
RET_INVALID_ARGUMENTS,
RET_MEMBER_NOT_INITIALISED
Definition at line 144 of file sensor.cpp.
| returnValue Sensor::setOutputNoise | ( | const Noise & | _noise, |
| double | _noiseSamplingTime | ||
| ) |
Assigns new additive noise with given sampling time to all components of the sensor signal.
- Parameters:
-
[in] _noise New additive noise. [in] _noiseSamplingTime New noise sampling time.
- Returns:
- SUCCESSFUL_RETURN,
RET_INVALID_ARGUMENTS
Definition at line 81 of file sensor.cpp.
| returnValue Sensor::setOutputNoise | ( | uint | idx, |
| const Noise & | _noise, | ||
| double | _noiseSamplingTime | ||
| ) |
Assigns new additive noise with given sampling time to given component of the sensor signal.
- Parameters:
-
[in] idx Index of component. [in] _noise New additive noise. [in] _noiseSamplingTime New noise sampling time.
- Returns:
- SUCCESSFUL_RETURN,
RET_INVALID_ARGUMENTS
Definition at line 102 of file sensor.cpp.
| returnValue Sensor::step | ( | VariablesGrid & | _y | ) | [virtual] |
Performs one step of the sensor transforming the given signal according to the internal sensor settings.
- Parameters:
-
[in,out] _y Sensor signal to be transformed.
- Returns:
- SUCCESSFUL_RETURN,
RET_BLOCK_NOT_READY,
RET_INVALID_ARGUMENTS,
RET_SENSOR_STEP_FAILED
Definition at line 192 of file sensor.cpp.
The documentation for this class was generated from the following files: