Declarations for ROS inclusion requirements and ROS-related tools. More...
#include "general_resources.hpp"#include "opencv_resources.hpp"#include "ros/ros.h"#include <std_msgs/Float32.h>#include "ros/node_handle.h"#include "std_msgs/String.h"#include <image_transport/image_transport.h>#include <sensor_msgs/Image.h>#include <sensor_msgs/CameraInfo.h>#include <sensor_msgs/SetCameraInfo.h>#include <sensor_msgs/image_encodings.h>#include <camera_calibration_parsers/parse_ini.h>#include <cv_bridge/cv_bridge.h>#include <tf/transform_broadcaster.h>#include <visualization_msgs/MarkerArray.h>#include <dynamic_reconfigure/server.h>
Include dependency graph for ros_resources.hpp:

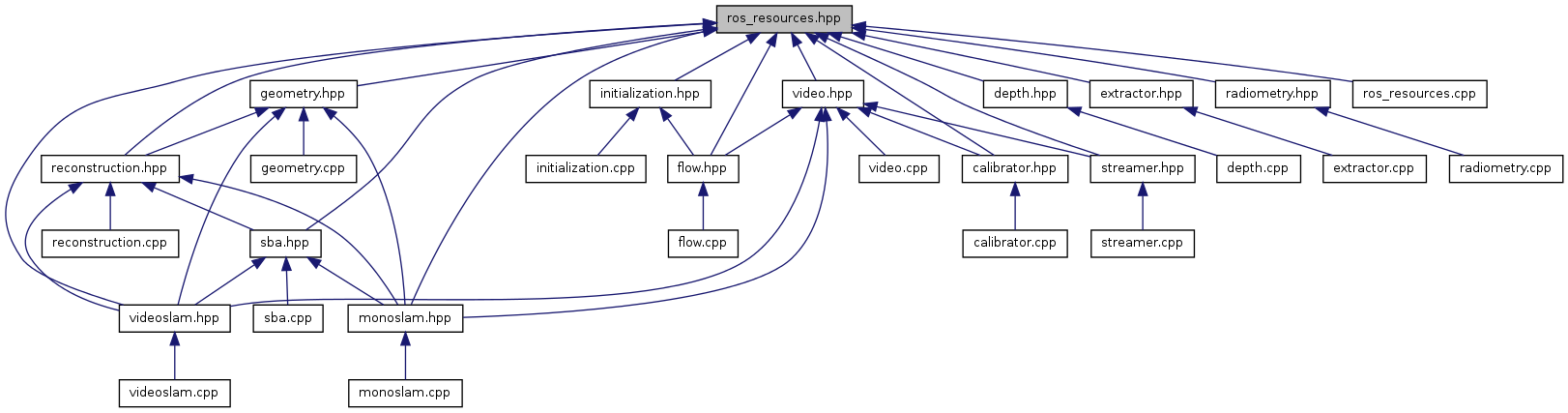
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Defines | |
| #define | MAX_RVIZ_DISPLACEMENT 1000 |
Functions | |
| void | changemode (int) |
| ros::Time | findAverageTime (ros::Time time1, ros::Time time2) |
| int | kbhit (void) |
| double | timeDiff (ros::Time time1, ros::Time time2) |
Detailed Description
Declarations for ROS inclusion requirements and ROS-related tools.
Definition in file ros_resources.hpp.
Define Documentation
| #define MAX_RVIZ_DISPLACEMENT 1000 |
Definition at line 41 of file ros_resources.hpp.
Function Documentation
| void changemode | ( | int | ) |
Definition at line 7 of file ros_resources.cpp.
| ros::Time findAverageTime | ( | ros::Time | time1, |
| ros::Time | time2 | ||
| ) |
Definition at line 50 of file ros_resources.cpp.
| int kbhit | ( | void | ) |
Definition at line 22 of file ros_resources.cpp.
Definition at line 38 of file ros_resources.cpp.