#include <pose_graph/pose_graph.h>#include <boost/format.hpp>#include <stdexcept>#include <string>
Include dependency graph for exception.h:
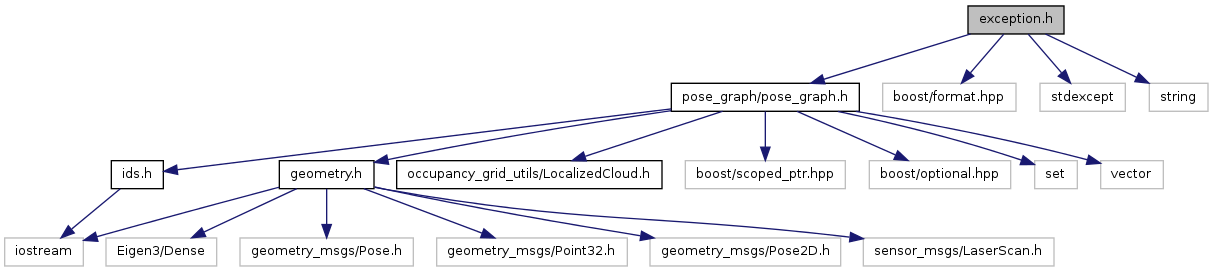
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | pose_graph::DisconnectedNodesException |
| Exception when expected two nodes to be connected and they aren't. More... | |
| struct | pose_graph::DuplicateEdgeIdException |
| Exception for trying to add an EdgeId that already exists. More... | |
| struct | pose_graph::DuplicateNodeIdException |
| Exception for trying to add a NodeId that already exists. More... | |
| struct | pose_graph::FileFormatException |
| Exception for incorrect format of saved graph. More... | |
| struct | pose_graph::FileOpenException |
| Exception for failing to open a file. More... | |
| struct | pose_graph::GraphOptimizationException |
| Exception when SPA optimization fails. More... | |
| struct | pose_graph::NonexistentParamException |
| Exception for not finding a ros parameter. More... | |
| class | pose_graph::PoseGraphException |
| A base class for all pose_graph exceptions; provides a handy boost::format parent constructor. More... | |
| struct | pose_graph::UnknownEdgeIdException |
| Exception for unknown EdgeId. More... | |
| struct | pose_graph::UnknownNodeIdException |
| Exception for unknown NodeId. More... | |
| struct | pose_graph::UnknownTopicException |
| Exception for a topic that hasn't been registered with a pose graph. More... | |
Namespaces | |
| namespace | pose_graph |