#include <ROSjloComm.h>
Public Member Functions | |
| virtual RelPose * | CreateNewPose (RelPose *pose, Matrix *mat, Matrix *cov) |
| virtual RelPose * | CreateNewPose (LocatedObjectID_t parent, Matrix *mat, Matrix *cov) |
| virtual bool | FreePose (LocatedObjectID_t poseId) |
| virtual jlo::LocatedObject * | GetParent (const jlo::LocatedObject &child) |
| virtual RelPose * | GetPose (LocatedObjectID_t poseId) |
| virtual RelPose * | GetPose (const std::string poseId, bool wait=true) |
| virtual RelPose * | GetPoseRelative (LocatedObjectID_t poseId, LocatedObjectID_t parentPoseId) |
| virtual void | NotifyPoseUpdate (RelPose *pose, bool sendObjectRelation=true) |
| ROSjloComm (std::string nodeName) | |
| virtual RelPose * | UpdatePose (RelPose *pose, LocatedObjectID_t parent, Matrix *mat, Matrix *cov) |
| ~ROSjloComm () | |
Private Member Functions | |
| bool | GetJloServiceClient (vision_srvs::srvjlo &msg) |
| ROSjloComm & | operator= (ROSjloComm &) |
Private Attributes | |
| ros::ServiceClient | m_client |
| std::string | m_service |
Definition at line 37 of file ROSjloComm.h.
| ROSjloComm::ROSjloComm | ( | std::string | nodeName | ) |
Definition at line 87 of file ROSjloComm.cpp.
Definition at line 108 of file ROSjloComm.cpp.
| RelPose * ROSjloComm::CreateNewPose | ( | RelPose * | pose, |
| Matrix * | mat, | ||
| Matrix * | cov | ||
| ) | [virtual] |
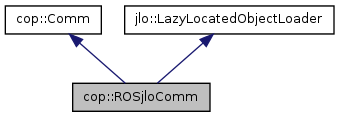
Reimplemented from cop::Comm.
Definition at line 177 of file ROSjloComm.cpp.
| RelPose * ROSjloComm::CreateNewPose | ( | LocatedObjectID_t | parent, |
| Matrix * | mat, | ||
| Matrix * | cov | ||
| ) | [virtual] |
Reimplemented from cop::Comm.
Definition at line 237 of file ROSjloComm.cpp.
| bool ROSjloComm::FreePose | ( | LocatedObjectID_t | poseId | ) | [virtual] |
Reimplemented from cop::Comm.
Definition at line 440 of file ROSjloComm.cpp.
| bool ROSjloComm::GetJloServiceClient | ( | vision_srvs::srvjlo & | msg | ) | [private] |
Definition at line 120 of file ROSjloComm.cpp.
| jlo::LocatedObject * ROSjloComm::GetParent | ( | const jlo::LocatedObject & | child | ) | [virtual] |
Implements jlo::LazyLocatedObjectLoader.
Definition at line 411 of file ROSjloComm.cpp.
| RelPose * ROSjloComm::GetPose | ( | LocatedObjectID_t | poseId | ) | [virtual] |
Reimplemented from cop::Comm.
Definition at line 358 of file ROSjloComm.cpp.
| RelPose * ROSjloComm::GetPose | ( | const std::string | poseId, |
| bool | wait = true |
||
| ) | [virtual] |
Reimplemented from cop::Comm.
Definition at line 378 of file ROSjloComm.cpp.
| RelPose * ROSjloComm::GetPoseRelative | ( | LocatedObjectID_t | poseId, |
| LocatedObjectID_t | parentPoseId | ||
| ) | [virtual] |
Reimplemented from cop::Comm.
Definition at line 418 of file ROSjloComm.cpp.
| void ROSjloComm::NotifyPoseUpdate | ( | RelPose * | pose, |
| bool | sendObjectRelation = true |
||
| ) | [virtual] |
Implements cop::Comm.
Definition at line 161 of file ROSjloComm.cpp.
| ROSjloComm& cop::ROSjloComm::operator= | ( | ROSjloComm & | ) | [inline, private] |
Definition at line 103 of file ROSjloComm.h.
| RelPose * ROSjloComm::UpdatePose | ( | RelPose * | pose, |
| LocatedObjectID_t | parent, | ||
| Matrix * | mat, | ||
| Matrix * | cov | ||
| ) | [virtual] |
Reimplemented from cop::Comm.
Definition at line 299 of file ROSjloComm.cpp.
ros::ServiceClient cop::ROSjloComm::m_client [private] |
Definition at line 111 of file ROSjloComm.h.
std::string cop::ROSjloComm::m_service [private] |
The sevice name of lo
Definition at line 110 of file ROSjloComm.h.

