#include <approach_lift_grasp.h>
Protected Member Functions | |
| virtual arm_navigation_msgs::OrderedCollisionOperations | collisionOperationsForGrasp (const object_manipulation_msgs::PickupGoal &pickup_goal, const object_manipulation_msgs::Grasp &grasp) |
| Collision operations to be used when planning the grasp motion. | |
| virtual arm_navigation_msgs::OrderedCollisionOperations | collisionOperationsForLift (const object_manipulation_msgs::PickupGoal &pickup_goal, const object_manipulation_msgs::Grasp &grasp) |
| Collision operations to be used when planning the lift motion. | |
| object_manipulation_msgs::GraspResult | getInterpolatedIKForGrasp (const object_manipulation_msgs::PickupGoal &pickup_goal, const object_manipulation_msgs::Grasp &grasp, GraspExecutionInfo &execution_info) |
| Computes an interpolated IK trajectory between pre_grasp and grasp and checks if it has enough points. | |
| object_manipulation_msgs::GraspResult | getInterpolatedIKForLift (const object_manipulation_msgs::PickupGoal &pickup_goal, const object_manipulation_msgs::Grasp &grasp, const std::vector< double > &grasp_joint_angles, GraspExecutionInfo &execution_info) |
| Calls the interpolated IK service to find a path from the grasp to lift the object. | |
| virtual std::vector < arm_navigation_msgs::LinkPadding > | linkPaddingForGrasp (const object_manipulation_msgs::PickupGoal &pickup_goal, const object_manipulation_msgs::Grasp &grasp) |
| Dynamic link padding to be used for grasp operation. | |
| virtual std::vector < arm_navigation_msgs::LinkPadding > | linkPaddingForLift (const object_manipulation_msgs::PickupGoal &pickup_goal, const object_manipulation_msgs::Grasp &grasp) |
| Dynamic link padding to be used when planning the lift motion. | |
| virtual void | testGrasp (const object_manipulation_msgs::PickupGoal &pickup_goal, const object_manipulation_msgs::Grasp &grasp, GraspExecutionInfo &execution_info) |
| Tests a single grasp. | |
Static Protected Attributes | |
| static float | EPS = 1.0e-6 |
| Epsilon margin of error used when checking trajectory lengths. | |
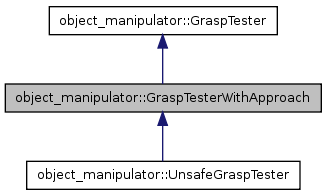
Standard grasp tester, attempts to compute Interpolated IK trajectories for both approach and lift.
Definition at line 154 of file approach_lift_grasp.h.
| arm_navigation_msgs::OrderedCollisionOperations object_manipulator::GraspTesterWithApproach::collisionOperationsForGrasp | ( | const object_manipulation_msgs::PickupGoal & | pickup_goal, | |
| const object_manipulation_msgs::Grasp & | grasp | |||
| ) | [protected, virtual] |
Collision operations to be used when planning the grasp motion.
Disable collisions between end-effector and target Disables ALL collisions on moved obstacles
Reimplemented in object_manipulator::UnsafeGraspTester.
Definition at line 196 of file approach_lift_grasp.cpp.
| arm_navigation_msgs::OrderedCollisionOperations object_manipulator::GraspTesterWithApproach::collisionOperationsForLift | ( | const object_manipulation_msgs::PickupGoal & | pickup_goal, | |
| const object_manipulation_msgs::Grasp & | grasp | |||
| ) | [protected, virtual] |
Collision operations to be used when planning the lift motion.
Disables collision between gripper and target Disables ALL collisions on moved obstacles
Reimplemented in object_manipulator::UnsafeGraspTester.
Definition at line 100 of file approach_lift_grasp.cpp.
| GraspResult object_manipulator::GraspTesterWithApproach::getInterpolatedIKForGrasp | ( | const object_manipulation_msgs::PickupGoal & | pickup_goal, | |
| const object_manipulation_msgs::Grasp & | grasp, | |||
| GraspExecutionInfo & | execution_info | |||
| ) | [protected] |
Computes an interpolated IK trajectory between pre_grasp and grasp and checks if it has enough points.
Definition at line 250 of file approach_lift_grasp.cpp.
| GraspResult object_manipulator::GraspTesterWithApproach::getInterpolatedIKForLift | ( | const object_manipulation_msgs::PickupGoal & | pickup_goal, | |
| const object_manipulation_msgs::Grasp & | grasp, | |||
| const std::vector< double > & | grasp_joint_angles, | |||
| GraspExecutionInfo & | execution_info | |||
| ) | [protected] |
Calls the interpolated IK service to find a path from the grasp to lift the object.
Definition at line 146 of file approach_lift_grasp.cpp.
| std::vector< arm_navigation_msgs::LinkPadding > object_manipulator::GraspTesterWithApproach::linkPaddingForGrasp | ( | const object_manipulation_msgs::PickupGoal & | pickup_goal, | |
| const object_manipulation_msgs::Grasp & | grasp | |||
| ) | [protected, virtual] |
Dynamic link padding to be used for grasp operation.
Zero padding on gripper links
Definition at line 242 of file approach_lift_grasp.cpp.
| std::vector< arm_navigation_msgs::LinkPadding > object_manipulator::GraspTesterWithApproach::linkPaddingForLift | ( | const object_manipulation_msgs::PickupGoal & | pickup_goal, | |
| const object_manipulation_msgs::Grasp & | grasp | |||
| ) | [protected, virtual] |
Dynamic link padding to be used when planning the lift motion.
Zero padding on gripper
Definition at line 138 of file approach_lift_grasp.cpp.
| void object_manipulator::GraspTesterWithApproach::testGrasp | ( | const object_manipulation_msgs::PickupGoal & | pickup_goal, | |
| const object_manipulation_msgs::Grasp & | grasp, | |||
| GraspExecutionInfo & | execution_info | |||
| ) | [protected, virtual] |
Tests a single grasp.
Implements object_manipulator::GraspTester.
Definition at line 305 of file approach_lift_grasp.cpp.
float object_manipulator::GraspTesterWithApproach::EPS = 1.0e-6 [static, protected] |
Epsilon margin of error used when checking trajectory lengths.
One thousandth of a mm.
Definition at line 195 of file approach_lift_grasp.h.

