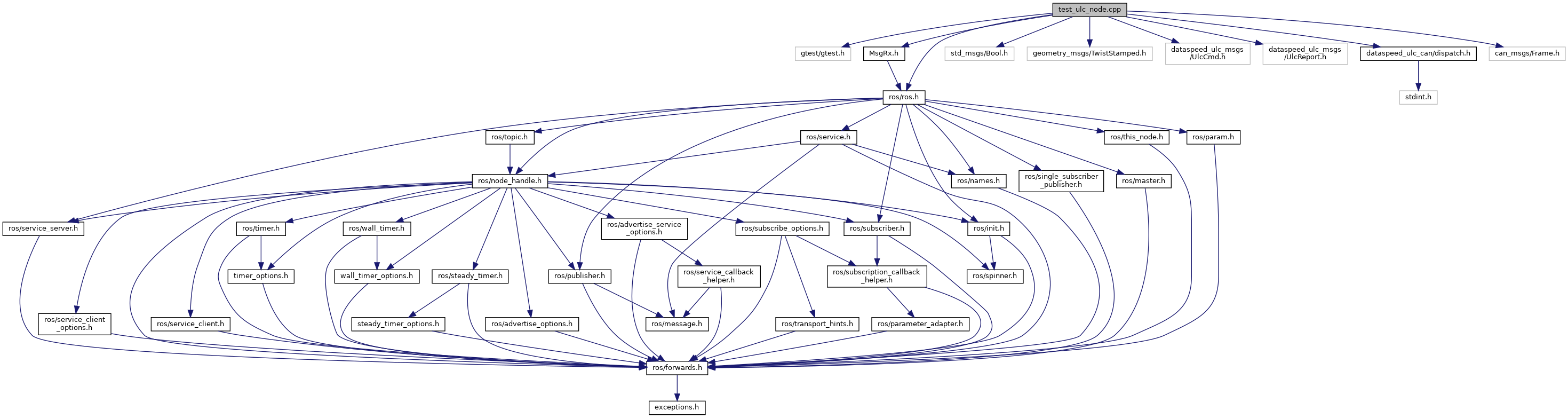
#include <gtest/gtest.h>
#include <ros/ros.h>
#include <std_msgs/Bool.h>
#include <geometry_msgs/TwistStamped.h>
#include <dataspeed_ulc_msgs/UlcCmd.h>
#include <dataspeed_ulc_msgs/UlcReport.h>
#include <dataspeed_ulc_can/dispatch.h>
#include <can_msgs/Frame.h>
#include "MsgRx.h"
Go to the source code of this file.
|
| static void | checkImmediateCfg () |
| |
| int | main (int argc, char **argv) |
| |
| void | recvCan (const can_msgs::FrameConstPtr &msg) |
| |
| void | recvReport (const dataspeed_ulc_msgs::UlcReportConstPtr &msg) |
| |
| | TEST (ULCNode, topics) |
| |
| | TEST (ULCNode, cfgTiming) |
| |
| | TEST (ULCNode, cmdRangeSaturation) |
| |
| | TEST (ULCNode, outOfBoundsInputs) |
| |
| | TEST (ULCNode, scaleFactors) |
| |
| | TEST (ULCNode, dbwEnable) |
| |
| | TEST (ULCNode, twistInputs) |
| |
| | TEST (ULCNode, reportParsing) |
| |
| template<class T > |
| static bool | waitForMsg (ros::WallDuration dur, const MsgRx< T > &msg_rx) |
| |
| static bool | waitForTopics (ros::WallDuration dur) |
| |
◆ checkImmediateCfg()
| static void checkImmediateCfg |
( |
| ) |
|
|
static |
◆ main()
| int main |
( |
int |
argc, |
|
|
char ** |
argv |
|
) |
| |
◆ recvCan()
| void recvCan |
( |
const can_msgs::FrameConstPtr & |
msg | ) |
|
◆ recvReport()
| void recvReport |
( |
const dataspeed_ulc_msgs::UlcReportConstPtr & |
msg | ) |
|
◆ TEST() [1/8]
| TEST |
( |
ULCNode |
, |
|
|
topics |
|
|
) |
| |
◆ TEST() [2/8]
| TEST |
( |
ULCNode |
, |
|
|
cfgTiming |
|
|
) |
| |
◆ TEST() [3/8]
| TEST |
( |
ULCNode |
, |
|
|
cmdRangeSaturation |
|
|
) |
| |
◆ TEST() [4/8]
| TEST |
( |
ULCNode |
, |
|
|
outOfBoundsInputs |
|
|
) |
| |
◆ TEST() [5/8]
| TEST |
( |
ULCNode |
, |
|
|
scaleFactors |
|
|
) |
| |
◆ TEST() [6/8]
| TEST |
( |
ULCNode |
, |
|
|
dbwEnable |
|
|
) |
| |
◆ TEST() [7/8]
| TEST |
( |
ULCNode |
, |
|
|
twistInputs |
|
|
) |
| |
◆ TEST() [8/8]
| TEST |
( |
ULCNode |
, |
|
|
reportParsing |
|
|
) |
| |
◆ waitForMsg()
◆ waitForTopics()
◆ ACCEL_CMD_SCALE_FACTOR
| const double ACCEL_CMD_SCALE_FACTOR = 0.0005 |
◆ ACCEL_REPORT_SCALE_FACTOR
| const double ACCEL_REPORT_SCALE_FACTOR = 0.05 |
◆ ANGULAR_ACCEL_SCALE_FACTOR
| const double ANGULAR_ACCEL_SCALE_FACTOR = 0.02 |
◆ CURVATURE_SCALE_FACTOR
| const double CURVATURE_SCALE_FACTOR = 0.0000061 |
◆ g_cfg_freq
◆ g_msg_ulc_cfg
◆ g_msg_ulc_cmd
◆ g_msg_ulc_report
◆ g_pub_can
◆ g_pub_enable
◆ g_pub_twist
◆ g_pub_twist_stamped
◆ g_pub_ulc_cmd
◆ g_sub_can
◆ g_sub_report
◆ g_ulc_cmd
| dataspeed_ulc_msgs::UlcCmd g_ulc_cmd |
◆ JERK_LIMIT_BRAKE_SCALE_FACTOR
| const double JERK_LIMIT_BRAKE_SCALE_FACTOR = 0.1 |
◆ JERK_LIMIT_THROTTLE_SCALE_FACTOR
| const double JERK_LIMIT_THROTTLE_SCALE_FACTOR = 0.1 |
◆ LATERAL_ACCEL_SCALE_FACTOR
| const double LATERAL_ACCEL_SCALE_FACTOR = 0.05 |
◆ LIN_VEL_SCALE_FACTOR
| const double LIN_VEL_SCALE_FACTOR = 0.0025 |
◆ LINEAR_ACCEL_SCALE_FACTOR
| const double LINEAR_ACCEL_SCALE_FACTOR = 0.025 |
◆ LINEAR_DECEL_SCALE_FACTOR
| const double LINEAR_DECEL_SCALE_FACTOR = 0.025 |
◆ MAX_ANGLE_SCALE_FACTOR
| const double MAX_ANGLE_SCALE_FACTOR = 5.0 |
◆ MAX_RATE_SCALE_FACTOR
| const double MAX_RATE_SCALE_FACTOR = 8.0 |
◆ pn
◆ SPEED_REPORT_SCALE_FACTOR
| const double SPEED_REPORT_SCALE_FACTOR = 0.02 |
◆ YAW_RATE_SCALE_FACTOR
| const double YAW_RATE_SCALE_FACTOR = 0.00025 |