Defines the class GraspDirection , the palm position and approach vector for a candidate grasp (used in the grasp planner). More...
#include "grasp_coordinates.h"#include "matvec3D.h"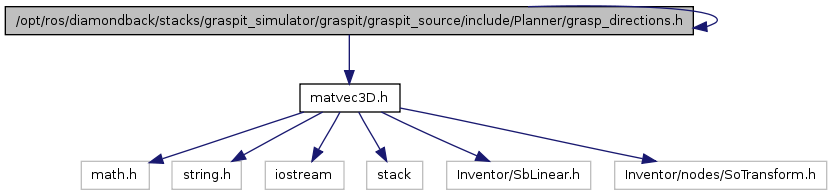

Go to the source code of this file.
Classes | |
| class | cartesianGraspDirection |
| This class is used when the palm position and direction are expressed in cartesian coordinates. More... | |
| class | cylindricalGraspDirection |
| This class is used when the palm position and direction are expressed in cylindrical coordinates. More... | |
| class | GraspDirection |
| This is the parent class for the different types of grasp directions. More... | |
| class | sphericalGraspDirection |
| This class is used when the palm position and direction are expressed in spherical coordinates. More... | |
Enumerations | |
| enum | graspDirectionType { GDT_CYL_SIDES, GDT_CYL_TOP_BOTTOM, GDT_CUBE_WIDTH, GDT_CUBE_HEIGHT, GDT_CUBE_DEPTH, GDT_SPH, GDT_CONE_TOP, GDT_CONE_BOTTOM, GDT_CONE_SIDE_PLANE, GDT_CONE_EDGE } |
Defines the class GraspDirection , the palm position and approach vector for a candidate grasp (used in the grasp planner).
Definition in file grasp_directions.h.
| enum graspDirectionType |
| GDT_CYL_SIDES | |
| GDT_CYL_TOP_BOTTOM | |
| GDT_CUBE_WIDTH | |
| GDT_CUBE_HEIGHT | |
| GDT_CUBE_DEPTH | |
| GDT_SPH | |
| GDT_CONE_TOP | |
| GDT_CONE_BOTTOM | |
| GDT_CONE_SIDE_PLANE | |
| GDT_CONE_EDGE |
Definition at line 40 of file grasp_directions.h.

