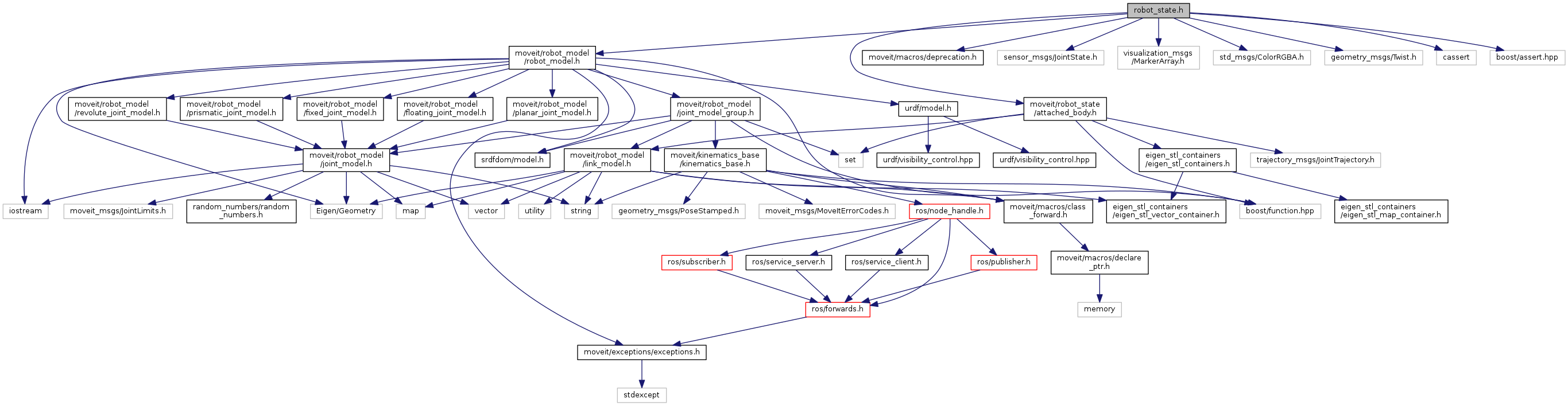
#include <moveit/robot_model/robot_model.h>
#include <moveit/robot_state/attached_body.h>
#include <moveit/macros/deprecation.h>
#include <sensor_msgs/JointState.h>
#include <visualization_msgs/MarkerArray.h>
#include <std_msgs/ColorRGBA.h>
#include <geometry_msgs/Twist.h>
#include <cassert>
#include <boost/assert.hpp>
Go to the source code of this file.
|
| typedef boost::function< bool(RobotState *robot_state, const JointModelGroup *joint_group, const double *joint_group_variable_values)> | moveit::core::GroupStateValidityCallbackFn |
| | Signature for functions that can verify that if the group joint_group in robot_state is set to joint_group_variable_values the state is valid or not. Returns true if the state is valid. This call is allowed to modify robot_state (e.g., set joint_group_variable_values) More...
|
| |