#include <robot_mode.h>
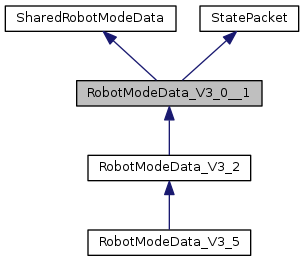
Inheritance diagram for RobotModeData_V3_0__1:
Public Member Functions | |
| virtual bool | consumeWith (URStatePacketConsumer &consumer) |
| virtual bool | parseWith (BinParser &bp) |
 Public Member Functions inherited from StatePacket Public Member Functions inherited from StatePacket | |
| StatePacket () | |
| virtual | ~StatePacket () |
Public Attributes | |
| robot_control_mode_V3_X | control_mode |
| robot_mode_V3_X | robot_mode |
| double | speed_scaling |
| double | target_speed_fraction |
| Public Attributes inherited from SharedRobotModeData | |
| bool | emergency_stopped |
| bool | physical_robot_connected |
| bool | program_paused |
| bool | program_running |
| bool | protective_stopped |
| bool | real_robot_enabled |
| bool | robot_power_on |
| uint64_t | timestamp |
Static Public Attributes | |
| static const size_t | SIZE |
| Static Public Attributes inherited from SharedRobotModeData | |
| static const size_t | SIZE = sizeof(uint64_t) + sizeof(uint8_t) * 6 |
Detailed Description
Definition at line 94 of file robot_mode.h.
Member Function Documentation
|
virtual |
Implements StatePacket.
Reimplemented in RobotModeData_V3_5, and RobotModeData_V3_2.
Definition at line 91 of file src/ur/robot_mode.cpp.
|
virtual |
Reimplemented from SharedRobotModeData.
Reimplemented in RobotModeData_V3_5, and RobotModeData_V3_2.
Definition at line 48 of file src/ur/robot_mode.cpp.
Member Data Documentation
| robot_control_mode_V3_X RobotModeData_V3_0__1::control_mode |
Definition at line 101 of file robot_mode.h.
| robot_mode_V3_X RobotModeData_V3_0__1::robot_mode |
Definition at line 100 of file robot_mode.h.
|
static |
Initial value:
Definition at line 106 of file robot_mode.h.
| double RobotModeData_V3_0__1::speed_scaling |
Definition at line 104 of file robot_mode.h.
| double RobotModeData_V3_0__1::target_speed_fraction |
Definition at line 103 of file robot_mode.h.
The documentation for this class was generated from the following files: