#include <action_server.h>
Public Member Functions | |
| ActionServer (ActionTrajectoryFollowerInterface &follower, std::vector< std::string > &joint_names, double max_velocity) | |
| virtual bool | consume (RTState_V1_6__7 &state) |
| virtual bool | consume (RTState_V1_8 &state) |
| virtual bool | consume (RTState_V3_0__1 &state) |
| virtual bool | consume (RTState_V3_2__3 &state) |
| virtual void | onRobotStateChange (RobotState state) |
| void | start () |
 Public Member Functions inherited from URRTPacketConsumer Public Member Functions inherited from URRTPacketConsumer | |
| virtual bool | consume (shared_ptr< RTPacket > packet) |
| Public Member Functions inherited from IConsumer< RTPacket > | |
| virtual void | onTimeout () |
| virtual void | setupConsumer () |
| virtual void | stopConsumer () |
| virtual void | teardownConsumer () |
Private Types | |
| typedef control_msgs::FollowJointTrajectoryAction | Action |
| typedef actionlib::ServerGoalHandle< Action > | GoalHandle |
| typedef control_msgs::FollowJointTrajectoryResult | Result |
| typedef actionlib::ActionServer< Action > | Server |
Private Member Functions | |
| void | interruptGoal (GoalHandle &gh) |
| void | onCancel (GoalHandle gh) |
| void | onGoal (GoalHandle gh) |
| std::vector< size_t > | reorderMap (std::vector< std::string > goal_joints) |
| void | trajectoryThread () |
| bool | try_execute (GoalHandle &gh, Result &res) |
| bool | updateState (RTShared &data) |
| bool | validate (GoalHandle &gh, Result &res) |
| bool | validateJoints (GoalHandle &gh, Result &res) |
| bool | validateState (GoalHandle &gh, Result &res) |
| bool | validateTrajectory (GoalHandle &gh, Result &res) |
Private Attributes | |
| Server | as_ |
| GoalHandle | curr_gh_ |
| ActionTrajectoryFollowerInterface & | follower_ |
| std::atomic< bool > | has_goal_ |
| std::atomic< bool > | interrupt_traj_ |
| std::vector< std::string > | joint_names_ |
| std::set< std::string > | joint_set_ |
| double | max_velocity_ |
| ros::NodeHandle | nh_ |
| std::array< double, 6 > | q_actual_ |
| std::array< double, 6 > | qd_actual_ |
| std::atomic< bool > | running_ |
| RobotState | state_ |
| std::condition_variable | tj_cv_ |
| std::mutex | tj_mutex_ |
| std::thread | tj_thread_ |
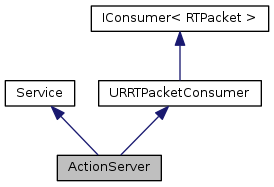
Detailed Description
Definition at line 40 of file action_server.h.
Member Typedef Documentation
|
private |
Definition at line 43 of file action_server.h.
|
private |
Definition at line 45 of file action_server.h.
|
private |
Definition at line 44 of file action_server.h.
|
private |
Definition at line 46 of file action_server.h.
Constructor & Destructor Documentation
| ActionServer::ActionServer | ( | ActionTrajectoryFollowerInterface & | follower, |
| std::vector< std::string > & | joint_names, | ||
| double | max_velocity | ||
| ) |
Definition at line 24 of file action_server.cpp.
Member Function Documentation
|
virtual |
Implements URRTPacketConsumer.
Definition at line 86 of file action_server.cpp.
|
virtual |
Implements URRTPacketConsumer.
Definition at line 90 of file action_server.cpp.
|
virtual |
Implements URRTPacketConsumer.
Definition at line 94 of file action_server.cpp.
|
virtual |
Implements URRTPacketConsumer.
Definition at line 98 of file action_server.cpp.
|
private |
|
private |
Definition at line 117 of file action_server.cpp.
|
private |
Definition at line 103 of file action_server.cpp.
|
virtual |
Implements Service.
Definition at line 50 of file action_server.cpp.
|
private |
Definition at line 263 of file action_server.cpp.
| void ActionServer::start | ( | ) |
Definition at line 39 of file action_server.cpp.
|
private |
Definition at line 280 of file action_server.cpp.
|
private |
Definition at line 238 of file action_server.cpp.
|
private |
Definition at line 79 of file action_server.cpp.
|
private |
Definition at line 129 of file action_server.cpp.
|
private |
Definition at line 159 of file action_server.cpp.
|
private |
Definition at line 134 of file action_server.cpp.
|
private |
Definition at line 178 of file action_server.cpp.
Member Data Documentation
|
private |
Definition at line 49 of file action_server.h.
|
private |
Definition at line 55 of file action_server.h.
|
private |
Definition at line 62 of file action_server.h.
|
private |
Definition at line 57 of file action_server.h.
|
private |
Definition at line 56 of file action_server.h.
|
private |
Definition at line 51 of file action_server.h.
|
private |
Definition at line 52 of file action_server.h.
|
private |
Definition at line 53 of file action_server.h.
|
private |
Definition at line 48 of file action_server.h.
|
private |
Definition at line 65 of file action_server.h.
|
private |
Definition at line 65 of file action_server.h.
|
private |
Definition at line 57 of file action_server.h.
|
private |
Definition at line 64 of file action_server.h.
|
private |
Definition at line 59 of file action_server.h.
|
private |
Definition at line 58 of file action_server.h.
|
private |
Definition at line 60 of file action_server.h.
The documentation for this class was generated from the following files: