The TinySLAM access point. SLAM users are supposed to work with it. More...
#include <tiny_fascade.h>
Public Member Functions | |
| void | add_scan_matcher_observer (ScanMatcherObsPtr obs) |
| virtual void | handle_laser_scan (TransformedLaserScan &scan) |
| void | remove_scan_matcher_observer (ScanMatcherObsPtr obs) |
| void | set_viewer (std::shared_ptr< RvizGridViewer > viewer) |
| TinySlamFascade (std::shared_ptr< GridCellStrategy > gcs, const TinyWorldParams ¶ms, const GridMapParams &init_map_params, bool skip_max_vals) | |
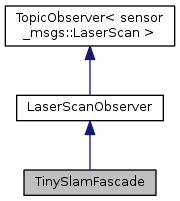
 Public Member Functions inherited from LaserScanObserver Public Member Functions inherited from LaserScanObserver | |
| virtual void | handle_transformed_msg (const ScanPtr msg, const tf::StampedTransform &t) |
| Converts ROS-specific structures that hold sensor data to internal framework's structures; Laser scan filtering is performed as part of the conversion. More... | |
| LaserScanObserver (bool skip_max_vals=false) | |
| Public Member Functions inherited from TopicObserver< sensor_msgs::LaserScan > | |
| virtual void | handle_transformed_msg (const boost::shared_ptr< sensor_msgs::LaserScan >, const tf::StampedTransform &)=0 |
Private Types | |
| using | ScanMatcherObsPtr = std::shared_ptr< GridScanMatcherObserver > |
Private Attributes | |
| std::shared_ptr< RvizGridViewer > | _viewer |
| std::unique_ptr< TinyWorld > | _world |
Detailed Description
The TinySLAM access point. SLAM users are supposed to work with it.
Responsibilities:
Handles data came from a scanner and locates a viewer.
Connects internal frameworks components to a single tinySLAM method (the fascade pattern is applied).
Definition at line 21 of file tiny_fascade.h.
Member Typedef Documentation
|
private |
Definition at line 23 of file tiny_fascade.h.
Constructor & Destructor Documentation
|
inline |
Initializes the tinySLAM method.
- Parameters
-
[in] gcs - a configuration of cells in a map (a cell strategy). [in] params - the tinySLAM parameters (see TinyWorldParams). [in] skip_max_vals - whether the values that exceed the max one specific to the laser scanner should be skipped.
Definition at line 34 of file tiny_fascade.h.
Member Function Documentation
|
inline |
Registers a scan matcher observer.
- Parameters
-
[in] obs - a new scanner matcher observer.
Definition at line 69 of file tiny_fascade.h.
|
inlinevirtual |
Updates the map and the robot pose with scan data.
The update is done according to a prediction-correction approach. (the odometry is used for a prediction, the laser scan - for a correction).
- Parameters
-
[in] scan - data from the robot's scanners (odnometry + laser scan).
Implements LaserScanObserver.
Definition at line 55 of file tiny_fascade.h.
|
inline |
Unregisters a scan matcher observer.
- Parameters
-
[in] obs - the scanner matcher observer to be removed.
Definition at line 77 of file tiny_fascade.h.
|
inline |
Sets a viewer component that is notified by a pose and map updates.
- Parameters
-
[in] viewer - a new value of the data member viewer.
Definition at line 45 of file tiny_fascade.h.
Member Data Documentation
|
private |
Definition at line 84 of file tiny_fascade.h.
|
private |
Definition at line 83 of file tiny_fascade.h.
The documentation for this class was generated from the following file: