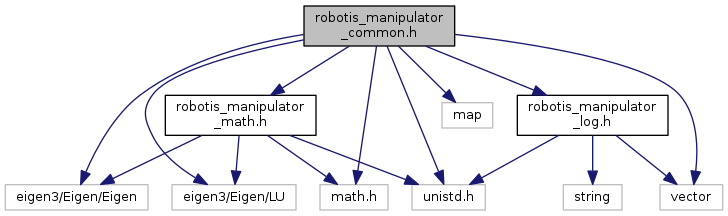
#include <unistd.h>#include <eigen3/Eigen/Eigen>#include <eigen3/Eigen/LU>#include <math.h>#include <vector>#include <map>#include "robotis_manipulator_math.h"#include "robotis_manipulator_log.h"
Include dependency graph for robotis_manipulator_common.h:
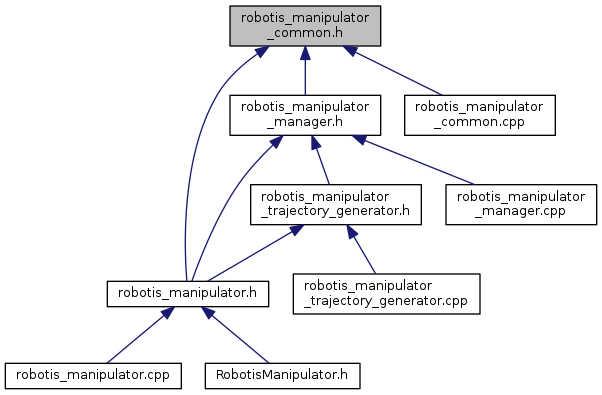
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | robotis_manipulator::_ChainingName |
| struct | robotis_manipulator::_Component |
| struct | robotis_manipulator::_DynamicPose |
| struct | robotis_manipulator::_Dynamicvector |
| struct | robotis_manipulator::_Force |
| struct | robotis_manipulator::_Inertia |
| struct | robotis_manipulator::_JointConstant |
| struct | robotis_manipulator::_KinematicPose |
| struct | robotis_manipulator::_Limit |
| struct | robotis_manipulator::_Moment |
| struct | robotis_manipulator::_Object |
| struct | robotis_manipulator::_Point |
| struct | robotis_manipulator::_Relative |
| struct | robotis_manipulator::_TaskWaypoint |
| struct | robotis_manipulator::_Time |
| struct | robotis_manipulator::_World |
| class | robotis_manipulator::Manipulator |
Namespaces | |
| robotis_manipulator | |
Functions | |
| bool | robotis_manipulator::setEffortToValue (std::vector< JointValue > *value, std::vector< double > effort) |
| bool | robotis_manipulator::setPositionToValue (std::vector< JointValue > *value, std::vector< double > position) |