#include <RiCMotor.h>
Public Member Functions | |
| virtual void | buildDevice () |
| CloseLoopMotorWithEncoder (byte id, TransportLayer *transportLayer, byte motorAddress, byte eSwitchPin, byte eSwitchType, CloseMotorType::CloseMotorType motoryType, CloseMotorMode::CloseMotorMode mode, CloseMotorWithEncoderParam param, std::string jointName) | |
| virtual void | write () |
Private Member Functions | |
| void | dynamicCallback (robotican_hardware_interface::RiCBoardConfig &config, uint32_t level) |
| virtual void | setParams (uint16_t speedLpfHz, uint16_t inputLpfHz, uint16_t pidHz, float speedLpfAlpha, float inputLpfAlpha, float KP, float KI, float KD, float KFF, float limit) |
| void | timerCallback (const ros::TimerEvent &e) |
Private Attributes | |
| dynamic_reconfigure::Server < robotican_hardware_interface::RiCBoardConfig > ::CallbackType | _callbackType |
| bool | _isSetParam |
| boost::recursive_mutex | _mutex |
| ros::NodeHandle | _nodeHandle |
| CloseMotorWithEncoderParam | _params |
| dynamic_reconfigure::Server < robotican_hardware_interface::RiCBoardConfig > | _server |
| ros::AsyncSpinner | _spinner |
| ros::Publisher | _statusPub |
| ros::Timer | _timer |
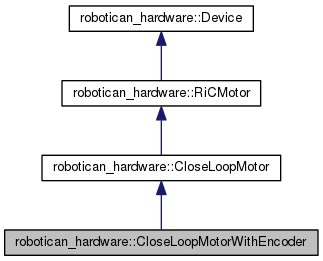
Detailed Description
Definition at line 148 of file RiCMotor.h.
Constructor & Destructor Documentation
| robotican_hardware::CloseLoopMotorWithEncoder::CloseLoopMotorWithEncoder | ( | byte | id, |
| TransportLayer * | transportLayer, | ||
| byte | motorAddress, | ||
| byte | eSwitchPin, | ||
| byte | eSwitchType, | ||
| CloseMotorType::CloseMotorType | motoryType, | ||
| CloseMotorMode::CloseMotorMode | mode, | ||
| CloseMotorWithEncoderParam | param, | ||
| std::string | jointName | ||
| ) |
Definition at line 168 of file RiCMotor.cpp.
Member Function Documentation
| void robotican_hardware::CloseLoopMotorWithEncoder::buildDevice | ( | ) | [virtual] |
Implements robotican_hardware::CloseLoopMotor.
Definition at line 202 of file RiCMotor.cpp.
| void robotican_hardware::CloseLoopMotorWithEncoder::dynamicCallback | ( | robotican_hardware_interface::RiCBoardConfig & | config, |
| uint32_t | level | ||
| ) | [private] |
Definition at line 288 of file RiCMotor.cpp.
| void robotican_hardware::CloseLoopMotorWithEncoder::setParams | ( | uint16_t | speedLpfHz, |
| uint16_t | inputLpfHz, | ||
| uint16_t | pidHz, | ||
| float | speedLpfAlpha, | ||
| float | inputLpfAlpha, | ||
| float | KP, | ||
| float | KI, | ||
| float | KD, | ||
| float | KFF, | ||
| float | limit | ||
| ) | [private, virtual] |
Implements robotican_hardware::CloseLoopMotor.
Definition at line 243 of file RiCMotor.cpp.
| void robotican_hardware::CloseLoopMotorWithEncoder::timerCallback | ( | const ros::TimerEvent & | e | ) | [private] |
Definition at line 295 of file RiCMotor.cpp.
| void robotican_hardware::CloseLoopMotorWithEncoder::write | ( | ) | [virtual] |
Reimplemented from robotican_hardware::CloseLoopMotor.
Definition at line 259 of file RiCMotor.cpp.
Member Data Documentation
dynamic_reconfigure::Server<robotican_hardware_interface::RiCBoardConfig>::CallbackType robotican_hardware::CloseLoopMotorWithEncoder::_callbackType [private] |
Definition at line 159 of file RiCMotor.h.
bool robotican_hardware::CloseLoopMotorWithEncoder::_isSetParam [private] |
Definition at line 156 of file RiCMotor.h.
boost::recursive_mutex robotican_hardware::CloseLoopMotorWithEncoder::_mutex [private] |
Definition at line 152 of file RiCMotor.h.
Reimplemented from robotican_hardware::Device.
Definition at line 151 of file RiCMotor.h.
Definition at line 150 of file RiCMotor.h.
dynamic_reconfigure::Server<robotican_hardware_interface::RiCBoardConfig> robotican_hardware::CloseLoopMotorWithEncoder::_server [private] |
Definition at line 158 of file RiCMotor.h.
Definition at line 153 of file RiCMotor.h.
Definition at line 154 of file RiCMotor.h.
Definition at line 155 of file RiCMotor.h.
The documentation for this class was generated from the following files: