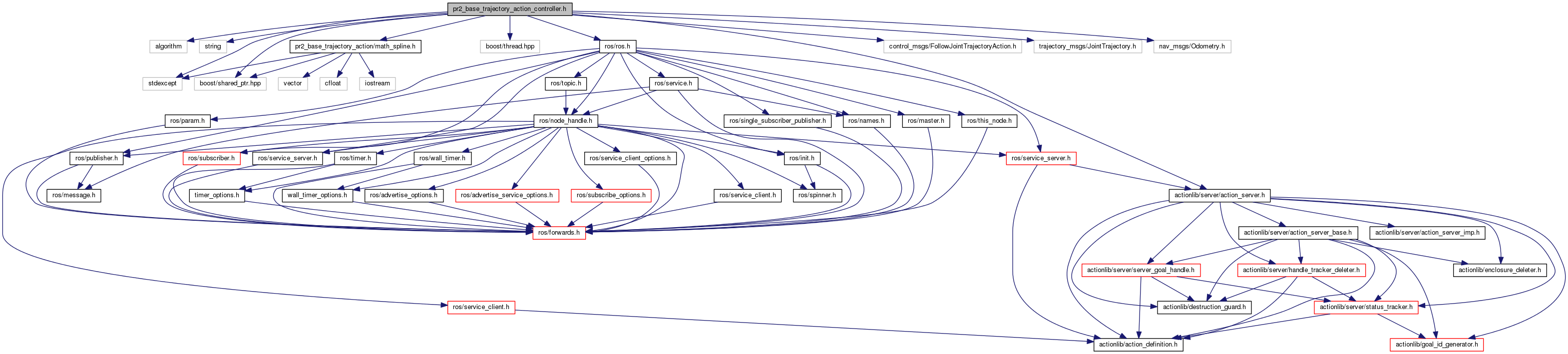
#include <algorithm>#include <string>#include <stdexcept>#include <boost/shared_ptr.hpp>#include <boost/thread.hpp>#include <ros/ros.h>#include <actionlib/server/action_server.h>#include <control_msgs/FollowJointTrajectoryAction.h>#include <trajectory_msgs/JointTrajectory.h>#include <nav_msgs/Odometry.h>#include <pr2_base_trajectory_action/math_spline.h>
Include dependency graph for pr2_base_trajectory_action_controller.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | pr2_base_trajectory_action::BaseJointState |
| class | pr2_base_trajectory_action::Controller |
| struct | pr2_base_trajectory_action::JointState |
| struct | pr2_base_trajectory_action::Trajectory::Segment |
| struct | pr2_base_trajectory_action::Trajectory |
Namespaces | |
| namespace | pr2_base_trajectory_action |
Typedefs | |
| typedef Server::GoalHandle | pr2_base_trajectory_action::GoalHandle |
| typedef actionlib::ActionServer < control_msgs::FollowJointTrajectoryAction > | pr2_base_trajectory_action::Server |
Functions | |
| template<typename T > | |
| int | pr2_base_trajectory_action::findIndex (std::vector< T > vec, T val) |
| template<typename E , typename M > | |
| boost::shared_ptr< M > | pr2_base_trajectory_action::share_member (boost::shared_ptr< E > e, M &m) |