Public Member Functions | |
| bool | initSim (const std::string &robot_namespace, ros::NodeHandle model_nh, gazebo::physics::ModelPtr parent_model, const urdf::Model *const urdf_model, std::vector< transmission_interface::TransmissionInfo > transmissions) |
| void | readSim (ros::Time time, ros::Duration period) |
| void | writeSim (ros::Time time, ros::Duration period) |
Private Attributes | |
| double | cmd_ [2] |
| double | eff_ [2] |
| gazebo::physics::JointPtr | joint_ [2] |
| hardware_interface::JointStateInterface | js_interface_ |
| double | pos_ [2] |
| double | vel_ [2] |
| hardware_interface::VelocityJointInterface | vj_interface_ |
Static Private Attributes | |
| static const double | max_drive_joint_torque_ = 20.0 |
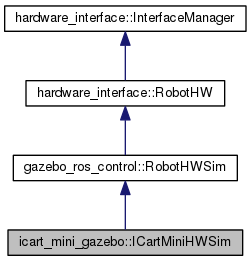
Detailed Description
Definition at line 52 of file icart_mini_hw_sim.cpp.
Member Function Documentation
| bool icart_mini_gazebo::ICartMiniHWSim::initSim | ( | const std::string & | robot_namespace, |
| ros::NodeHandle | model_nh, | ||
| gazebo::physics::ModelPtr | parent_model, | ||
| const urdf::Model *const | urdf_model, | ||
| std::vector< transmission_interface::TransmissionInfo > | transmissions | ||
| ) | [inline, virtual] |
Implements gazebo_ros_control::RobotHWSim.
Definition at line 69 of file icart_mini_hw_sim.cpp.
| void icart_mini_gazebo::ICartMiniHWSim::readSim | ( | ros::Time | time, |
| ros::Duration | period | ||
| ) | [inline, virtual] |
Implements gazebo_ros_control::RobotHWSim.
Definition at line 110 of file icart_mini_hw_sim.cpp.
| void icart_mini_gazebo::ICartMiniHWSim::writeSim | ( | ros::Time | time, |
| ros::Duration | period | ||
| ) | [inline, virtual] |
Implements gazebo_ros_control::RobotHWSim.
Definition at line 118 of file icart_mini_hw_sim.cpp.
Member Data Documentation
double icart_mini_gazebo::ICartMiniHWSim::cmd_[2] [private] |
Definition at line 57 of file icart_mini_hw_sim.cpp.
double icart_mini_gazebo::ICartMiniHWSim::eff_[2] [private] |
Definition at line 60 of file icart_mini_hw_sim.cpp.
gazebo::physics::JointPtr icart_mini_gazebo::ICartMiniHWSim::joint_[2] [private] |
Definition at line 62 of file icart_mini_hw_sim.cpp.
Definition at line 64 of file icart_mini_hw_sim.cpp.
const double icart_mini_gazebo::ICartMiniHWSim::max_drive_joint_torque_ = 20.0 [static, private] |
Definition at line 55 of file icart_mini_hw_sim.cpp.
double icart_mini_gazebo::ICartMiniHWSim::pos_[2] [private] |
Definition at line 58 of file icart_mini_hw_sim.cpp.
double icart_mini_gazebo::ICartMiniHWSim::vel_[2] [private] |
Definition at line 59 of file icart_mini_hw_sim.cpp.
hardware_interface::VelocityJointInterface icart_mini_gazebo::ICartMiniHWSim::vj_interface_ [private] |
Definition at line 65 of file icart_mini_hw_sim.cpp.
The documentation for this class was generated from the following file: