#include <msg.h>
Public Member Functions | |
| virtual int | deserialize (unsigned char *data)=0 |
| virtual const char * | getMD5 ()=0 |
| virtual const char * | getType ()=0 |
| virtual int | serialize (unsigned char *outbuffer) const =0 |
Static Public Member Functions | |
| static int | deserializeAvrFloat64 (const unsigned char *inbuffer, float *f) |
| This tricky function handles demoting a 64bit double to a 32bit float, so that AVR can understand messages containing float64 fields, despite AVR having no native support for double. | |
| static int | serializeAvrFloat64 (unsigned char *outbuffer, const float f) |
| This tricky function handles promoting a 32bit float to a 64bit double, so that AVR can publish messages containing float64 fields, despite AVV having no native support for double. | |
Detailed Description
Member Function Documentation
| virtual int ros::Msg::deserialize | ( | unsigned char * | data | ) | [pure virtual] |
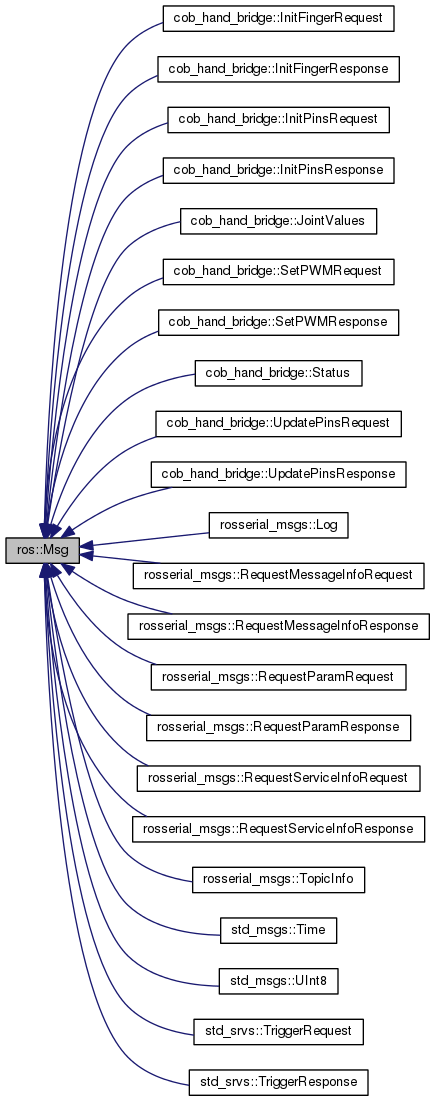
Implemented in cob_hand_bridge::InitFingerResponse, rosserial_msgs::RequestParamResponse, cob_hand_bridge::SetPWMResponse, cob_hand_bridge::InitPinsResponse, rosserial_msgs::RequestServiceInfoResponse, cob_hand_bridge::UpdatePinsResponse, rosserial_msgs::RequestMessageInfoResponse, cob_hand_bridge::InitFingerRequest, rosserial_msgs::TopicInfo, cob_hand_bridge::Status, std_srvs::TriggerResponse, cob_hand_bridge::JointValues, cob_hand_bridge::SetPWMRequest, cob_hand_bridge::InitPinsRequest, rosserial_msgs::Log, cob_hand_bridge::UpdatePinsRequest, std_msgs::Time, rosserial_msgs::RequestMessageInfoRequest, rosserial_msgs::RequestParamRequest, rosserial_msgs::RequestServiceInfoRequest, std_msgs::UInt8, and std_srvs::TriggerRequest.
| static int ros::Msg::deserializeAvrFloat64 | ( | const unsigned char * | inbuffer, |
| float * | f | ||
| ) | [inline, static] |
This tricky function handles demoting a 64bit double to a 32bit float, so that AVR can understand messages containing float64 fields, despite AVR having no native support for double.
- Parameters:
-
[in] inbuffer pointer for buffer to deserialize from. [out] f pointer to place the deserialized value in.
- Returns:
- number of bytes to advance the buffer pointer.
| virtual const char* ros::Msg::getMD5 | ( | ) | [pure virtual] |
Implemented in rosserial_msgs::RequestParamResponse, cob_hand_bridge::InitFingerResponse, cob_hand_bridge::SetPWMResponse, cob_hand_bridge::InitFingerRequest, rosserial_msgs::RequestServiceInfoResponse, cob_hand_bridge::InitPinsResponse, rosserial_msgs::TopicInfo, rosserial_msgs::RequestMessageInfoResponse, cob_hand_bridge::JointValues, cob_hand_bridge::Status, cob_hand_bridge::UpdatePinsResponse, cob_hand_bridge::SetPWMRequest, std_srvs::TriggerResponse, cob_hand_bridge::InitPinsRequest, rosserial_msgs::Log, cob_hand_bridge::UpdatePinsRequest, std_msgs::Time, rosserial_msgs::RequestMessageInfoRequest, rosserial_msgs::RequestParamRequest, rosserial_msgs::RequestServiceInfoRequest, std_msgs::UInt8, and std_srvs::TriggerRequest.
| virtual const char* ros::Msg::getType | ( | ) | [pure virtual] |
Implemented in rosserial_msgs::RequestParamResponse, cob_hand_bridge::InitFingerResponse, cob_hand_bridge::SetPWMResponse, cob_hand_bridge::InitFingerRequest, rosserial_msgs::RequestServiceInfoResponse, cob_hand_bridge::InitPinsResponse, rosserial_msgs::TopicInfo, rosserial_msgs::RequestMessageInfoResponse, cob_hand_bridge::JointValues, cob_hand_bridge::Status, cob_hand_bridge::UpdatePinsResponse, cob_hand_bridge::SetPWMRequest, std_srvs::TriggerResponse, cob_hand_bridge::InitPinsRequest, rosserial_msgs::Log, cob_hand_bridge::UpdatePinsRequest, std_msgs::Time, rosserial_msgs::RequestMessageInfoRequest, rosserial_msgs::RequestParamRequest, rosserial_msgs::RequestServiceInfoRequest, std_msgs::UInt8, and std_srvs::TriggerRequest.
| virtual int ros::Msg::serialize | ( | unsigned char * | outbuffer | ) | const [pure virtual] |
Implemented in cob_hand_bridge::InitFingerResponse, cob_hand_bridge::SetPWMResponse, cob_hand_bridge::InitPinsResponse, rosserial_msgs::RequestParamResponse, cob_hand_bridge::UpdatePinsResponse, rosserial_msgs::RequestServiceInfoResponse, rosserial_msgs::RequestMessageInfoResponse, std_srvs::TriggerResponse, cob_hand_bridge::Status, rosserial_msgs::TopicInfo, cob_hand_bridge::InitFingerRequest, cob_hand_bridge::InitPinsRequest, cob_hand_bridge::SetPWMRequest, rosserial_msgs::Log, cob_hand_bridge::JointValues, cob_hand_bridge::UpdatePinsRequest, rosserial_msgs::RequestMessageInfoRequest, rosserial_msgs::RequestParamRequest, rosserial_msgs::RequestServiceInfoRequest, std_msgs::Time, std_msgs::UInt8, and std_srvs::TriggerRequest.
| static int ros::Msg::serializeAvrFloat64 | ( | unsigned char * | outbuffer, |
| const float | f | ||
| ) | [inline, static] |
This tricky function handles promoting a 32bit float to a 64bit double, so that AVR can publish messages containing float64 fields, despite AVV having no native support for double.
- Parameters:
-
[out] outbuffer pointer for buffer to serialize to. [in] f value to serialize.
- Returns:
- number of bytes to advance the buffer pointer.
The documentation for this class was generated from the following file: