#include <reemc_hardware_gazebo.h>
Detailed Description
Definition at line 60 of file reemc_hardware_gazebo.h.
Constructor & Destructor Documentation
Definition at line 49 of file reemc_hardware_gazebo.cpp.
Member Function Documentation
| bool reemc_hardware_gazebo::ReemcHardwareGazebo::initSim | ( | const std::string & | robot_ns, |
| ros::NodeHandle | nh, | ||
| gazebo::physics::ModelPtr | model, | ||
| const urdf::Model *const | urdf_model, | ||
| std::vector< transmission_interface::TransmissionInfo > | transmissions | ||
| ) | [virtual] |
Retrieving max joint effort from urdf because values are not set in sim_joints_
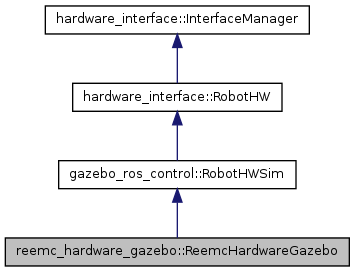
Implements gazebo_ros_control::RobotHWSim.
Definition at line 53 of file reemc_hardware_gazebo.cpp.
| void reemc_hardware_gazebo::ReemcHardwareGazebo::readSim | ( | ros::Time | time, |
| ros::Duration | period | ||
| ) | [virtual] |
Implements gazebo_ros_control::RobotHWSim.
Definition at line 199 of file reemc_hardware_gazebo.cpp.
| void reemc_hardware_gazebo::ReemcHardwareGazebo::writeSim | ( | ros::Time | time, |
| ros::Duration | period | ||
| ) | [virtual] |
Implements gazebo_ros_control::RobotHWSim.
Definition at line 247 of file reemc_hardware_gazebo.cpp.
Member Data Documentation
hardware_interface::ActuatorStateInterface reemc_hardware_gazebo::ReemcHardwareGazebo::act_state_interface_ [private] |
Definition at line 106 of file reemc_hardware_gazebo.h.
double reemc_hardware_gazebo::ReemcHardwareGazebo::base_ang_vel_[3] [private] |
Definition at line 94 of file reemc_hardware_gazebo.h.
double reemc_hardware_gazebo::ReemcHardwareGazebo::base_lin_acc_[3] [private] |
Definition at line 95 of file reemc_hardware_gazebo.h.
double reemc_hardware_gazebo::ReemcHardwareGazebo::base_orientation_[4] [private] |
Definition at line 93 of file reemc_hardware_gazebo.h.
hardware_interface::ForceTorqueSensorInterface reemc_hardware_gazebo::ReemcHardwareGazebo::ft_sensor_interface_ [private] |
Definition at line 110 of file reemc_hardware_gazebo.h.
boost::shared_ptr<gazebo::sensors::ImuSensor> reemc_hardware_gazebo::ReemcHardwareGazebo::imu_sensor_ [private] |
Definition at line 101 of file reemc_hardware_gazebo.h.
hardware_interface::ImuSensorInterface reemc_hardware_gazebo::ReemcHardwareGazebo::imu_sensor_interface_ [private] |
Definition at line 111 of file reemc_hardware_gazebo.h.
std::vector<double> reemc_hardware_gazebo::ReemcHardwareGazebo::jnt_curr_limit_cmd_ [private] |
Definition at line 85 of file reemc_hardware_gazebo.h.
hardware_interface::CurrentLimitActuatorInterface reemc_hardware_gazebo::ReemcHardwareGazebo::jnt_curr_limit_cmd_interface_ [private] |
Definition at line 107 of file reemc_hardware_gazebo.h.
std::vector<double> reemc_hardware_gazebo::ReemcHardwareGazebo::jnt_eff_ [private] |
Definition at line 82 of file reemc_hardware_gazebo.h.
joint_limits_interface::PositionJointSoftLimitsInterface reemc_hardware_gazebo::ReemcHardwareGazebo::jnt_limits_interface_ [private] |
Definition at line 114 of file reemc_hardware_gazebo.h.
std::vector<double> reemc_hardware_gazebo::ReemcHardwareGazebo::jnt_max_effort_ [private] |
Definition at line 86 of file reemc_hardware_gazebo.h.
std::vector<double> reemc_hardware_gazebo::ReemcHardwareGazebo::jnt_pos_ [private] |
Definition at line 80 of file reemc_hardware_gazebo.h.
std::vector<double> reemc_hardware_gazebo::ReemcHardwareGazebo::jnt_pos_cmd_ [private] |
Definition at line 84 of file reemc_hardware_gazebo.h.
hardware_interface::PositionJointInterface reemc_hardware_gazebo::ReemcHardwareGazebo::jnt_pos_cmd_interface_ [private] |
Definition at line 105 of file reemc_hardware_gazebo.h.
hardware_interface::JointStateInterface reemc_hardware_gazebo::ReemcHardwareGazebo::jnt_state_interface_ [private] |
Definition at line 104 of file reemc_hardware_gazebo.h.
std::vector<double> reemc_hardware_gazebo::ReemcHardwareGazebo::jnt_vel_ [private] |
Definition at line 81 of file reemc_hardware_gazebo.h.
gazebo::physics::JointPtr reemc_hardware_gazebo::ReemcHardwareGazebo::left_ankle_ [private] |
Definition at line 99 of file reemc_hardware_gazebo.h.
double reemc_hardware_gazebo::ReemcHardwareGazebo::left_force_[3] [private] |
Definition at line 88 of file reemc_hardware_gazebo.h.
double reemc_hardware_gazebo::ReemcHardwareGazebo::left_torque_[3] [private] |
Definition at line 89 of file reemc_hardware_gazebo.h.
unsigned int reemc_hardware_gazebo::ReemcHardwareGazebo::n_dof_ [private] |
Definition at line 78 of file reemc_hardware_gazebo.h.
std::vector<control_toolbox::Pid> reemc_hardware_gazebo::ReemcHardwareGazebo::pids_ [private] |
Definition at line 117 of file reemc_hardware_gazebo.h.
gazebo::physics::JointPtr reemc_hardware_gazebo::ReemcHardwareGazebo::right_ankle_ [private] |
Definition at line 100 of file reemc_hardware_gazebo.h.
double reemc_hardware_gazebo::ReemcHardwareGazebo::right_force_[3] [private] |
Definition at line 90 of file reemc_hardware_gazebo.h.
double reemc_hardware_gazebo::ReemcHardwareGazebo::right_torque_[3] [private] |
Definition at line 91 of file reemc_hardware_gazebo.h.
std::vector<gazebo::physics::JointPtr> reemc_hardware_gazebo::ReemcHardwareGazebo::sim_joints_ [private] |
Definition at line 98 of file reemc_hardware_gazebo.h.
The documentation for this class was generated from the following files: