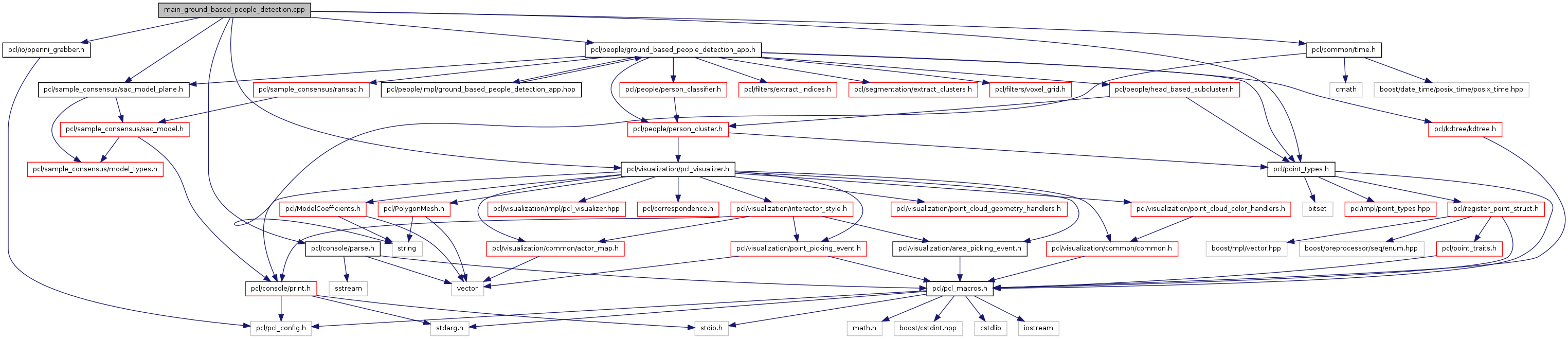
#include <pcl/console/parse.h>#include <pcl/point_types.h>#include <pcl/visualization/pcl_visualizer.h>#include <pcl/io/openni_grabber.h>#include <pcl/sample_consensus/sac_model_plane.h>#include <pcl/people/ground_based_people_detection_app.h>#include <pcl/common/time.h>
Include dependency graph for people/apps/main_ground_based_people_detection.cpp:
Go to the source code of this file.
Classes | |
| struct | callback_args |
Typedefs | |
| typedef pcl::PointCloud< PointT > | PointCloudT |
| typedef pcl::PointXYZRGBA | PointT |
Enumerations | |
| enum | { COLS = 640, ROWS = 480 } |
Functions | |
| void | cloud_cb_ (const PointCloudT::ConstPtr &callback_cloud, PointCloudT::Ptr &cloud, bool *new_cloud_available_flag) |
| int | main (int argc, char **argv) |
| void | pp_callback (const pcl::visualization::PointPickingEvent &event, void *args) |
| int | print_help () |
Variables | |
| boost::mutex | cloud_mutex |
| pcl::visualization::PCLVisualizer | viewer ("PCL Viewer") |
Typedef Documentation
| typedef pcl::PointCloud<PointT> PointCloudT |
Definition at line 57 of file people/apps/main_ground_based_people_detection.cpp.
| typedef pcl::PointXYZRGBA PointT |
Definition at line 56 of file people/apps/main_ground_based_people_detection.cpp.
Enumeration Type Documentation
| anonymous enum |
Definition at line 65 of file people/apps/main_ground_based_people_detection.cpp.
Function Documentation
| void cloud_cb_ | ( | const PointCloudT::ConstPtr & | callback_cloud, |
| PointCloudT::Ptr & | cloud, | ||
| bool * | new_cloud_available_flag | ||
| ) |
Definition at line 81 of file people/apps/main_ground_based_people_detection.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 113 of file people/apps/main_ground_based_people_detection.cpp.
| void pp_callback | ( | const pcl::visualization::PointPickingEvent & | event, |
| void * | args | ||
| ) |
Definition at line 97 of file people/apps/main_ground_based_people_detection.cpp.
| int print_help | ( | ) |
Definition at line 67 of file people/apps/main_ground_based_people_detection.cpp.
Variable Documentation
| boost::mutex cloud_mutex |
Definition at line 63 of file people/apps/main_ground_based_people_detection.cpp.