#include <pfhrgb.h>
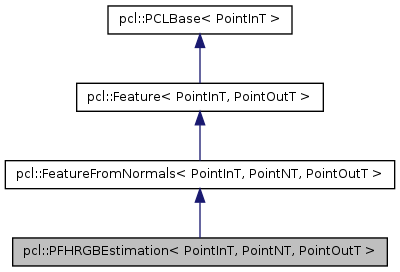
Inheritance diagram for pcl::PFHRGBEstimation< PointInT, PointNT, PointOutT >:
Public Types | |
| typedef boost::shared_ptr < const PFHRGBEstimation < PointInT, PointNT, PointOutT > > | ConstPtr |
| typedef Feature< PointInT, PointOutT >::PointCloudOut | PointCloudOut |
| typedef boost::shared_ptr < PFHRGBEstimation< PointInT, PointNT, PointOutT > > | Ptr |
Public Member Functions | |
| void | computePointPFHRGBSignature (const pcl::PointCloud< PointInT > &cloud, const pcl::PointCloud< PointNT > &normals, const std::vector< int > &indices, int nr_split, Eigen::VectorXf &pfhrgb_histogram) |
| bool | computeRGBPairFeatures (const pcl::PointCloud< PointInT > &cloud, const pcl::PointCloud< PointNT > &normals, int p_idx, int q_idx, float &f1, float &f2, float &f3, float &f4, float &f5, float &f6, float &f7) |
| PFHRGBEstimation () | |
Protected Member Functions | |
| void | computeFeature (PointCloudOut &output) |
| Abstract feature estimation method. | |
Private Attributes | |
| float | d_pi_ |
| Float constant = 1.0 / (2.0 * M_PI) | |
| int | f_index_ [7] |
| Placeholder for a histogram index. | |
| int | nr_subdiv_ |
| The number of subdivisions for each angular feature interval. | |
| Eigen::VectorXf | pfhrgb_histogram_ |
| Placeholder for a point's PFHRGB signature. | |
| Eigen::VectorXf | pfhrgb_tuple_ |
| Placeholder for a PFHRGB 7-tuple. | |
Detailed Description
template<typename PointInT, typename PointNT, typename PointOutT = pcl::PFHRGBSignature250>
class pcl::PFHRGBEstimation< PointInT, PointNT, PointOutT >
Member Typedef Documentation
template<typename PointInT , typename PointNT , typename PointOutT = pcl::PFHRGBSignature250>
| typedef boost::shared_ptr<const PFHRGBEstimation<PointInT, PointNT, PointOutT> > pcl::PFHRGBEstimation< PointInT, PointNT, PointOutT >::ConstPtr |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
template<typename PointInT , typename PointNT , typename PointOutT = pcl::PFHRGBSignature250>
| typedef Feature<PointInT, PointOutT>::PointCloudOut pcl::PFHRGBEstimation< PointInT, PointNT, PointOutT >::PointCloudOut |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
template<typename PointInT , typename PointNT , typename PointOutT = pcl::PFHRGBSignature250>
| typedef boost::shared_ptr<PFHRGBEstimation<PointInT, PointNT, PointOutT> > pcl::PFHRGBEstimation< PointInT, PointNT, PointOutT >::Ptr |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
Constructor & Destructor Documentation
template<typename PointInT , typename PointNT , typename PointOutT = pcl::PFHRGBSignature250>
| pcl::PFHRGBEstimation< PointInT, PointNT, PointOutT >::PFHRGBEstimation | ( | ) | [inline] |
Member Function Documentation
template<typename PointInT , typename PointNT , typename PointOutT >
| void pcl::PFHRGBEstimation< PointInT, PointNT, PointOutT >::computeFeature | ( | PointCloudOut & | output | ) | [protected, virtual] |
Abstract feature estimation method.
- Parameters:
-
[out] output the resultant features
nr_subdiv^3 for RGB and nr_subdiv^3 for the angular features
Implements pcl::Feature< PointInT, PointOutT >.
Definition at line 143 of file pfhrgb.hpp.
template<typename PointInT , typename PointNT , typename PointOutT >
| void pcl::PFHRGBEstimation< PointInT, PointNT, PointOutT >::computePointPFHRGBSignature | ( | const pcl::PointCloud< PointInT > & | cloud, |
| const pcl::PointCloud< PointNT > & | normals, | ||
| const std::vector< int > & | indices, | ||
| int | nr_split, | ||
| Eigen::VectorXf & | pfhrgb_histogram | ||
| ) |
Definition at line 64 of file pfhrgb.hpp.
template<typename PointInT , typename PointNT , typename PointOutT >
| bool pcl::PFHRGBEstimation< PointInT, PointNT, PointOutT >::computeRGBPairFeatures | ( | const pcl::PointCloud< PointInT > & | cloud, |
| const pcl::PointCloud< PointNT > & | normals, | ||
| int | p_idx, | ||
| int | q_idx, | ||
| float & | f1, | ||
| float & | f2, | ||
| float & | f3, | ||
| float & | f4, | ||
| float & | f5, | ||
| float & | f6, | ||
| float & | f7 | ||
| ) |
Definition at line 47 of file pfhrgb.hpp.
Member Data Documentation
template<typename PointInT , typename PointNT , typename PointOutT = pcl::PFHRGBSignature250>
float pcl::PFHRGBEstimation< PointInT, PointNT, PointOutT >::d_pi_ [private] |
template<typename PointInT , typename PointNT , typename PointOutT = pcl::PFHRGBSignature250>
int pcl::PFHRGBEstimation< PointInT, PointNT, PointOutT >::f_index_[7] [private] |
template<typename PointInT , typename PointNT , typename PointOutT = pcl::PFHRGBSignature250>
int pcl::PFHRGBEstimation< PointInT, PointNT, PointOutT >::nr_subdiv_ [private] |
template<typename PointInT , typename PointNT , typename PointOutT = pcl::PFHRGBSignature250>
Eigen::VectorXf pcl::PFHRGBEstimation< PointInT, PointNT, PointOutT >::pfhrgb_histogram_ [private] |
template<typename PointInT , typename PointNT , typename PointOutT = pcl::PFHRGBSignature250>
Eigen::VectorXf pcl::PFHRGBEstimation< PointInT, PointNT, PointOutT >::pfhrgb_tuple_ [private] |
The documentation for this class was generated from the following files: