IntensityGradientEstimation estimates the intensity gradient for a point cloud that contains position and intensity values. The intensity gradient at a given point will be a vector orthogonal to the surface normal and pointing in the direction of the greatest increase in local intensity; the vector's magnitude indicates the rate of intensity change. More...
#include <intensity_gradient.h>
Public Types | |
| typedef boost::shared_ptr < const IntensityGradientEstimation < PointInT, PointNT, PointOutT, IntensitySelectorT > > | ConstPtr |
| typedef Feature< PointInT, PointOutT >::PointCloudOut | PointCloudOut |
| typedef boost::shared_ptr < IntensityGradientEstimation < PointInT, PointNT, PointOutT, IntensitySelectorT > > | Ptr |
Public Member Functions | |
| IntensityGradientEstimation () | |
| Empty constructor. | |
| void | setNumberOfThreads (unsigned int nr_threads=0) |
| Initialize the scheduler and set the number of threads to use. | |
Protected Member Functions | |
| void | computeFeature (PointCloudOut &output) |
| Estimate the intensity gradients for a set of points given in <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod (). | |
| void | computePointIntensityGradient (const pcl::PointCloud< PointInT > &cloud, const std::vector< int > &indices, const Eigen::Vector3f &point, float mean_intensity, const Eigen::Vector3f &normal, Eigen::Vector3f &gradient) |
| Estimate the intensity gradient around a given point based on its spatial neighborhood of points. | |
Protected Attributes | |
| IntensitySelectorT | intensity_ |
| intensity field accessor structure | |
| unsigned int | threads_ |
| number of threads to be used, default 0 (auto) | |
Detailed Description
template<typename PointInT, typename PointNT, typename PointOutT, typename IntensitySelectorT = pcl::common::IntensityFieldAccessor<PointInT>>
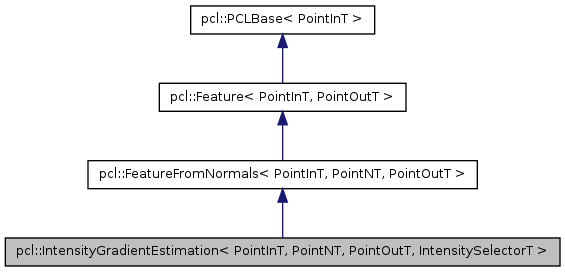
class pcl::IntensityGradientEstimation< PointInT, PointNT, PointOutT, IntensitySelectorT >
IntensityGradientEstimation estimates the intensity gradient for a point cloud that contains position and intensity values. The intensity gradient at a given point will be a vector orthogonal to the surface normal and pointing in the direction of the greatest increase in local intensity; the vector's magnitude indicates the rate of intensity change.
Definition at line 56 of file intensity_gradient.h.
Member Typedef Documentation
| typedef boost::shared_ptr<const IntensityGradientEstimation<PointInT, PointNT, PointOutT, IntensitySelectorT> > pcl::IntensityGradientEstimation< PointInT, PointNT, PointOutT, IntensitySelectorT >::ConstPtr |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
Definition at line 60 of file intensity_gradient.h.
| typedef Feature<PointInT, PointOutT>::PointCloudOut pcl::IntensityGradientEstimation< PointInT, PointNT, PointOutT, IntensitySelectorT >::PointCloudOut |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
Definition at line 69 of file intensity_gradient.h.
| typedef boost::shared_ptr<IntensityGradientEstimation<PointInT, PointNT, PointOutT, IntensitySelectorT> > pcl::IntensityGradientEstimation< PointInT, PointNT, PointOutT, IntensitySelectorT >::Ptr |
Reimplemented from pcl::FeatureFromNormals< PointInT, PointNT, PointOutT >.
Definition at line 59 of file intensity_gradient.h.
Constructor & Destructor Documentation
| pcl::IntensityGradientEstimation< PointInT, PointNT, PointOutT, IntensitySelectorT >::IntensityGradientEstimation | ( | ) | [inline] |
Empty constructor.
Definition at line 72 of file intensity_gradient.h.
Member Function Documentation
| void pcl::IntensityGradientEstimation< PointInT, PointNT, PointOutT, IntensitySelectorT >::computeFeature | ( | PointCloudOut & | output | ) | [protected, virtual] |
Estimate the intensity gradients for a set of points given in <setInputCloud (), setIndices ()> using the surface in setSearchSurface () and the spatial locator in setSearchMethod ().
- Parameters:
-
output the resultant point cloud that contains the intensity gradient vectors
Implements pcl::Feature< PointInT, PointOutT >.
Definition at line 144 of file intensity_gradient.hpp.
| void pcl::IntensityGradientEstimation< PointInT, PointNT, PointOutT, IntensitySelectorT >::computePointIntensityGradient | ( | const pcl::PointCloud< PointInT > & | cloud, |
| const std::vector< int > & | indices, | ||
| const Eigen::Vector3f & | point, | ||
| float | mean_intensity, | ||
| const Eigen::Vector3f & | normal, | ||
| Eigen::Vector3f & | gradient | ||
| ) | [protected] |
Estimate the intensity gradient around a given point based on its spatial neighborhood of points.
- Parameters:
-
cloud a point cloud dataset containing XYZI coordinates (Cartesian coordinates + intensity) indices the indices of the neighoring points in the dataset point the 3D Cartesian coordinates of the point at which to estimate the gradient normal the 3D surface normal of the given point gradient the resultant 3D gradient vector
Definition at line 48 of file intensity_gradient.hpp.
| void pcl::IntensityGradientEstimation< PointInT, PointNT, PointOutT, IntensitySelectorT >::setNumberOfThreads | ( | unsigned int | nr_threads = 0 | ) | [inline] |
Initialize the scheduler and set the number of threads to use.
- Parameters:
-
nr_threads the number of hardware threads to use (0 sets the value back to automatic)
Definition at line 81 of file intensity_gradient.h.
Member Data Documentation
IntensitySelectorT pcl::IntensityGradientEstimation< PointInT, PointNT, PointOutT, IntensitySelectorT >::intensity_ [protected] |
intensity field accessor structure
Definition at line 108 of file intensity_gradient.h.
unsigned int pcl::IntensityGradientEstimation< PointInT, PointNT, PointOutT, IntensitySelectorT >::threads_ [protected] |
number of threads to be used, default 0 (auto)
Definition at line 110 of file intensity_gradient.h.
The documentation for this class was generated from the following files: