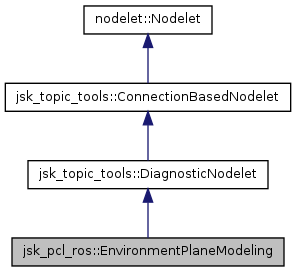
Nodelet implementation of jsk_pcl/EnvironmentPlaneModeling. More...
#include <environment_plane_modeling.h>
Public Types | |
| typedef EnvironmentPlaneModelingConfig | Config |
| typedef message_filters::sync_policies::ExactTime < sensor_msgs::PointCloud2, sensor_msgs::PointCloud2, jsk_recognition_msgs::PolygonArray, jsk_recognition_msgs::ModelCoefficientsArray, jsk_recognition_msgs::ClusterPointIndices > | SyncPolicy |
Public Member Functions | |
| EnvironmentPlaneModeling () | |
Protected Member Functions | |
| virtual void | boundingBoxCallback (const jsk_recognition_msgs::BoundingBox::ConstPtr &box_array) |
| virtual std::vector < GridPlane::Ptr > | buildGridPlanes (pcl::PointCloud< pcl::PointNormal >::Ptr &cloud, std::vector< ConvexPolygon::Ptr > convexes, std::set< int > &non_plane_indices) |
| make GridPlane from ConvexPolygon and PointCloud | |
| virtual std::vector < GridPlane::Ptr > | completeFootprintRegion (const std_msgs::Header &header, std::vector< GridPlane::Ptr > &grid_maps) |
| virtual GridPlane::Ptr | completeGridMapByBoundingBox (const jsk_recognition_msgs::BoundingBox::ConstPtr &box, const std_msgs::Header &header, GridPlane::Ptr grid_map) |
| virtual void | configCallback (Config &config, uint32_t level) |
| Callback method of dynamic reconfigure. | |
| virtual std::vector < ConvexPolygon::Ptr > | convertToConvexPolygons (const pcl::PointCloud< pcl::PointNormal >::Ptr &cloud, const jsk_recognition_msgs::ClusterPointIndices::ConstPtr &indices_msg, const jsk_recognition_msgs::ModelCoefficientsArray::ConstPtr &coefficients_msg) |
| virtual std::vector < GridPlane::Ptr > | erodeFiltering (std::vector< GridPlane::Ptr > &grid_maps) |
| virtual void | inputCallback (const sensor_msgs::PointCloud2::ConstPtr &cloud_msg, const sensor_msgs::PointCloud2::ConstPtr &full_cloud_msg, const jsk_recognition_msgs::PolygonArray::ConstPtr &polygon_msg, const jsk_recognition_msgs::ModelCoefficientsArray::ConstPtr &coefficients_msg, const jsk_recognition_msgs::ClusterPointIndices::ConstPtr &indices_msg) |
| main callback function | |
| virtual bool | isValidFrameIds (const sensor_msgs::PointCloud2::ConstPtr &cloud_msg, const sensor_msgs::PointCloud2::ConstPtr &full_cloud_msg, const jsk_recognition_msgs::PolygonArray::ConstPtr &polygon_msg, const jsk_recognition_msgs::ModelCoefficientsArray::ConstPtr &coefficients_msg, const jsk_recognition_msgs::ClusterPointIndices::ConstPtr &indices_msg) |
| virtual int | lookupGroundPlaneForFootprint (const std::string &footprint_frame_id, const std_msgs::Header &header, const std::vector< GridPlane::Ptr > &grid_maps) |
| virtual int | lookupGroundPlaneForFootprint (const Eigen::Affine3f &pose, const std::vector< GridPlane::Ptr > &grid_maps) |
| virtual std::vector < ConvexPolygon::Ptr > | magnifyConvexes (std::vector< ConvexPolygon::Ptr > &convexes) |
| Magnify ConvexPolygons according to maginify_distance_ parameter. | |
| virtual std::vector < GridPlane::Ptr > | morphologicalFiltering (std::vector< GridPlane::Ptr > &raw_grid_maps) |
| virtual void | moveBaseSimpleGoalCallback (const geometry_msgs::PoseStamped::ConstPtr &msg) |
| virtual void | onInit () |
| virtual void | printInputData (const sensor_msgs::PointCloud2::ConstPtr &cloud_msg, const sensor_msgs::PointCloud2::ConstPtr &full_cloud_msg, const jsk_recognition_msgs::PolygonArray::ConstPtr &polygon_msg, const jsk_recognition_msgs::ModelCoefficientsArray::ConstPtr &coefficients_msg, const jsk_recognition_msgs::ClusterPointIndices::ConstPtr &indices_msg) |
| virtual void | publishConvexPolygons (ros::Publisher &pub, const std_msgs::Header &header, std::vector< ConvexPolygon::Ptr > &convexes) |
| Publish array of ConvexPolygon::Ptr by using specified publisher. | |
| virtual void | publishConvexPolygonsBoundaries (ros::Publisher &pub, const std_msgs::Header &header, std::vector< ConvexPolygon::Ptr > &convexes) |
| virtual void | publishGridMaps (ros::Publisher &pub, const std_msgs::Header &header, std::vector< GridPlane::Ptr > &grids) |
| Publish array of GridPlane::Ptr by using specified publisher. | |
| virtual void | subscribe () |
| subscription callback function of jsk_topic_tools::DiagnosticNodelet. This method is empty method because EnvironmentPlaneModeling needs to always run | |
| virtual void | unsubscribe () |
| unsubscription callback function of jsk_topic_tools::DiagnosticNodelet. This method is empty method because EnvironmentPlaneModeling needs to always run | |
Protected Attributes | |
| bool | complete_footprint_region_ |
| double | distance_threshold_ |
| int | erode_filter_size_ |
| std::vector< std::string > | footprint_frames_ |
| double | footprint_plane_angular_threshold_ |
| double | footprint_plane_distance_threshold_ |
| std_msgs::Header | latest_global_header_ |
| std::vector< GridPlane::Ptr > | latest_grid_maps_ |
| jsk_recognition_msgs::BoundingBox::ConstPtr | latest_leg_bounding_box_ |
| double | magnify_distance_ |
| int | morphological_filter_size_ |
| boost::mutex | mutex_ |
| double | normal_threshold_ |
| ros::Publisher | pub_debug_convex_point_cloud_ |
| ros::Publisher | pub_debug_magnified_plane_coords_ |
| ros::Publisher | pub_debug_magnified_polygons_ |
| ros::Publisher | pub_debug_noeroded_grid_map_ |
| ros::Publisher | pub_debug_plane_coords_ |
| ros::Publisher | pub_debug_raw_grid_map_ |
| ros::Publisher | pub_grid_map_ |
| ros::Publisher | pub_non_plane_indices_ |
| ros::Publisher | pub_snapped_move_base_simple_goal_ |
| double | resolution_ |
| boost::shared_ptr < dynamic_reconfigure::Server < Config > > | srv_ |
| message_filters::Subscriber < sensor_msgs::PointCloud2 > | sub_cloud_ |
| message_filters::Subscriber < jsk_recognition_msgs::ModelCoefficientsArray > | sub_coefficients_ |
| message_filters::Subscriber < sensor_msgs::PointCloud2 > | sub_full_cloud_ |
| message_filters::Subscriber < jsk_recognition_msgs::ClusterPointIndices > | sub_indices_ |
| ros::Subscriber | sub_leg_bbox_ |
| ros::Subscriber | sub_move_base_simple_goal_ |
| message_filters::Subscriber < jsk_recognition_msgs::PolygonArray > | sub_polygons_ |
| boost::shared_ptr < message_filters::Synchronizer < SyncPolicy > > | sync_ |
| tf::TransformListener * | tf_listener_ |
Detailed Description
Nodelet implementation of jsk_pcl/EnvironmentPlaneModeling.
Definition at line 80 of file environment_plane_modeling.h.
Member Typedef Documentation
| typedef EnvironmentPlaneModelingConfig jsk_pcl_ros::EnvironmentPlaneModeling::Config |
Definition at line 83 of file environment_plane_modeling.h.
| typedef message_filters::sync_policies::ExactTime< sensor_msgs::PointCloud2, sensor_msgs::PointCloud2, jsk_recognition_msgs::PolygonArray, jsk_recognition_msgs::ModelCoefficientsArray, jsk_recognition_msgs::ClusterPointIndices > jsk_pcl_ros::EnvironmentPlaneModeling::SyncPolicy |
Definition at line 90 of file environment_plane_modeling.h.
Constructor & Destructor Documentation
Definition at line 91 of file environment_plane_modeling.h.
Member Function Documentation
| void jsk_pcl_ros::EnvironmentPlaneModeling::boundingBoxCallback | ( | const jsk_recognition_msgs::BoundingBox::ConstPtr & | box_array | ) | [protected, virtual] |
Definition at line 234 of file environment_plane_modeling_nodelet.cpp.
| std::vector< GridPlane::Ptr > jsk_pcl_ros::EnvironmentPlaneModeling::buildGridPlanes | ( | pcl::PointCloud< pcl::PointNormal >::Ptr & | cloud, |
| std::vector< ConvexPolygon::Ptr > | convexes, | ||
| std::set< int > & | non_plane_indices | ||
| ) | [protected, virtual] |
make GridPlane from ConvexPolygon and PointCloud
Definition at line 514 of file environment_plane_modeling_nodelet.cpp.
| std::vector< GridPlane::Ptr > jsk_pcl_ros::EnvironmentPlaneModeling::completeFootprintRegion | ( | const std_msgs::Header & | header, |
| std::vector< GridPlane::Ptr > & | grid_maps | ||
| ) | [protected, virtual] |
Definition at line 429 of file environment_plane_modeling_nodelet.cpp.
| GridPlane::Ptr jsk_pcl_ros::EnvironmentPlaneModeling::completeGridMapByBoundingBox | ( | const jsk_recognition_msgs::BoundingBox::ConstPtr & | box, |
| const std_msgs::Header & | header, | ||
| GridPlane::Ptr | grid_map | ||
| ) | [protected, virtual] |
Definition at line 400 of file environment_plane_modeling_nodelet.cpp.
| void jsk_pcl_ros::EnvironmentPlaneModeling::configCallback | ( | Config & | config, |
| uint32_t | level | ||
| ) | [protected, virtual] |
Callback method of dynamic reconfigure.
Definition at line 116 of file environment_plane_modeling_nodelet.cpp.
| std::vector< ConvexPolygon::Ptr > jsk_pcl_ros::EnvironmentPlaneModeling::convertToConvexPolygons | ( | const pcl::PointCloud< pcl::PointNormal >::Ptr & | cloud, |
| const jsk_recognition_msgs::ClusterPointIndices::ConstPtr & | indices_msg, | ||
| const jsk_recognition_msgs::ModelCoefficientsArray::ConstPtr & | coefficients_msg | ||
| ) | [protected, virtual] |
Definition at line 567 of file environment_plane_modeling_nodelet.cpp.
| std::vector< GridPlane::Ptr > jsk_pcl_ros::EnvironmentPlaneModeling::erodeFiltering | ( | std::vector< GridPlane::Ptr > & | grid_maps | ) | [protected, virtual] |
Definition at line 340 of file environment_plane_modeling_nodelet.cpp.
| void jsk_pcl_ros::EnvironmentPlaneModeling::inputCallback | ( | const sensor_msgs::PointCloud2::ConstPtr & | cloud_msg, |
| const sensor_msgs::PointCloud2::ConstPtr & | full_cloud_msg, | ||
| const jsk_recognition_msgs::PolygonArray::ConstPtr & | polygon_msg, | ||
| const jsk_recognition_msgs::ModelCoefficientsArray::ConstPtr & | coefficients_msg, | ||
| const jsk_recognition_msgs::ClusterPointIndices::ConstPtr & | indices_msg | ||
| ) | [protected, virtual] |
main callback function
Definition at line 241 of file environment_plane_modeling_nodelet.cpp.
| bool jsk_pcl_ros::EnvironmentPlaneModeling::isValidFrameIds | ( | const sensor_msgs::PointCloud2::ConstPtr & | cloud_msg, |
| const sensor_msgs::PointCloud2::ConstPtr & | full_cloud_msg, | ||
| const jsk_recognition_msgs::PolygonArray::ConstPtr & | polygon_msg, | ||
| const jsk_recognition_msgs::ModelCoefficientsArray::ConstPtr & | coefficients_msg, | ||
| const jsk_recognition_msgs::ClusterPointIndices::ConstPtr & | indices_msg | ||
| ) | [protected, virtual] |
Definition at line 144 of file environment_plane_modeling_nodelet.cpp.
| int jsk_pcl_ros::EnvironmentPlaneModeling::lookupGroundPlaneForFootprint | ( | const std::string & | footprint_frame_id, |
| const std_msgs::Header & | header, | ||
| const std::vector< GridPlane::Ptr > & | grid_maps | ||
| ) | [protected, virtual] |
Definition at line 384 of file environment_plane_modeling_nodelet.cpp.
| int jsk_pcl_ros::EnvironmentPlaneModeling::lookupGroundPlaneForFootprint | ( | const Eigen::Affine3f & | pose, |
| const std::vector< GridPlane::Ptr > & | grid_maps | ||
| ) | [protected, virtual] |
Definition at line 351 of file environment_plane_modeling_nodelet.cpp.
| std::vector< ConvexPolygon::Ptr > jsk_pcl_ros::EnvironmentPlaneModeling::magnifyConvexes | ( | std::vector< ConvexPolygon::Ptr > & | convexes | ) | [protected, virtual] |
Magnify ConvexPolygons according to maginify_distance_ parameter.
Definition at line 551 of file environment_plane_modeling_nodelet.cpp.
| std::vector< GridPlane::Ptr > jsk_pcl_ros::EnvironmentPlaneModeling::morphologicalFiltering | ( | std::vector< GridPlane::Ptr > & | raw_grid_maps | ) | [protected, virtual] |
Definition at line 465 of file environment_plane_modeling_nodelet.cpp.
| void jsk_pcl_ros::EnvironmentPlaneModeling::moveBaseSimpleGoalCallback | ( | const geometry_msgs::PoseStamped::ConstPtr & | msg | ) | [protected, virtual] |
Definition at line 182 of file environment_plane_modeling_nodelet.cpp.
| void jsk_pcl_ros::EnvironmentPlaneModeling::onInit | ( | void | ) | [protected, virtual] |
Reimplemented from jsk_topic_tools::DiagnosticNodelet.
Definition at line 54 of file environment_plane_modeling_nodelet.cpp.
| void jsk_pcl_ros::EnvironmentPlaneModeling::printInputData | ( | const sensor_msgs::PointCloud2::ConstPtr & | cloud_msg, |
| const sensor_msgs::PointCloud2::ConstPtr & | full_cloud_msg, | ||
| const jsk_recognition_msgs::PolygonArray::ConstPtr & | polygon_msg, | ||
| const jsk_recognition_msgs::ModelCoefficientsArray::ConstPtr & | coefficients_msg, | ||
| const jsk_recognition_msgs::ClusterPointIndices::ConstPtr & | indices_msg | ||
| ) | [protected, virtual] |
Definition at line 129 of file environment_plane_modeling_nodelet.cpp.
| void jsk_pcl_ros::EnvironmentPlaneModeling::publishConvexPolygons | ( | ros::Publisher & | pub, |
| const std_msgs::Header & | header, | ||
| std::vector< ConvexPolygon::Ptr > & | convexes | ||
| ) | [protected, virtual] |
Publish array of ConvexPolygon::Ptr by using specified publisher.
Definition at line 535 of file environment_plane_modeling_nodelet.cpp.
| void jsk_pcl_ros::EnvironmentPlaneModeling::publishConvexPolygonsBoundaries | ( | ros::Publisher & | pub, |
| const std_msgs::Header & | header, | ||
| std::vector< ConvexPolygon::Ptr > & | convexes | ||
| ) | [protected, virtual] |
Definition at line 478 of file environment_plane_modeling_nodelet.cpp.
| void jsk_pcl_ros::EnvironmentPlaneModeling::publishGridMaps | ( | ros::Publisher & | pub, |
| const std_msgs::Header & | header, | ||
| std::vector< GridPlane::Ptr > & | grids | ||
| ) | [protected, virtual] |
Publish array of GridPlane::Ptr by using specified publisher.
Definition at line 498 of file environment_plane_modeling_nodelet.cpp.
| virtual void jsk_pcl_ros::EnvironmentPlaneModeling::subscribe | ( | ) | [inline, protected, virtual] |
subscription callback function of jsk_topic_tools::DiagnosticNodelet. This method is empty method because EnvironmentPlaneModeling needs to always run
Implements jsk_topic_tools::ConnectionBasedNodelet.
Definition at line 100 of file environment_plane_modeling.h.
| virtual void jsk_pcl_ros::EnvironmentPlaneModeling::unsubscribe | ( | ) | [inline, protected, virtual] |
unsubscription callback function of jsk_topic_tools::DiagnosticNodelet. This method is empty method because EnvironmentPlaneModeling needs to always run
Implements jsk_topic_tools::ConnectionBasedNodelet.
Definition at line 107 of file environment_plane_modeling.h.
Member Data Documentation
bool jsk_pcl_ros::EnvironmentPlaneModeling::complete_footprint_region_ [protected] |
Definition at line 245 of file environment_plane_modeling.h.
double jsk_pcl_ros::EnvironmentPlaneModeling::distance_threshold_ [protected] |
Definition at line 241 of file environment_plane_modeling.h.
int jsk_pcl_ros::EnvironmentPlaneModeling::erode_filter_size_ [protected] |
Definition at line 246 of file environment_plane_modeling.h.
Definition at line 234 of file environment_plane_modeling.h.
double jsk_pcl_ros::EnvironmentPlaneModeling::footprint_plane_angular_threshold_ [protected] |
Definition at line 248 of file environment_plane_modeling.h.
double jsk_pcl_ros::EnvironmentPlaneModeling::footprint_plane_distance_threshold_ [protected] |
Definition at line 247 of file environment_plane_modeling.h.
Definition at line 236 of file environment_plane_modeling.h.
Definition at line 235 of file environment_plane_modeling.h.
jsk_recognition_msgs::BoundingBox::ConstPtr jsk_pcl_ros::EnvironmentPlaneModeling::latest_leg_bounding_box_ [protected] |
Definition at line 233 of file environment_plane_modeling.h.
double jsk_pcl_ros::EnvironmentPlaneModeling::magnify_distance_ [protected] |
Definition at line 240 of file environment_plane_modeling.h.
Definition at line 244 of file environment_plane_modeling.h.
Definition at line 213 of file environment_plane_modeling.h.
double jsk_pcl_ros::EnvironmentPlaneModeling::normal_threshold_ [protected] |
Definition at line 242 of file environment_plane_modeling.h.
Definition at line 223 of file environment_plane_modeling.h.
Definition at line 227 of file environment_plane_modeling.h.
Definition at line 222 of file environment_plane_modeling.h.
Definition at line 225 of file environment_plane_modeling.h.
Definition at line 226 of file environment_plane_modeling.h.
Definition at line 224 of file environment_plane_modeling.h.
Definition at line 228 of file environment_plane_modeling.h.
Definition at line 229 of file environment_plane_modeling.h.
ros::Publisher jsk_pcl_ros::EnvironmentPlaneModeling::pub_snapped_move_base_simple_goal_ [protected] |
Definition at line 230 of file environment_plane_modeling.h.
double jsk_pcl_ros::EnvironmentPlaneModeling::resolution_ [protected] |
Definition at line 243 of file environment_plane_modeling.h.
boost::shared_ptr<dynamic_reconfigure::Server<Config> > jsk_pcl_ros::EnvironmentPlaneModeling::srv_ [protected] |
Definition at line 231 of file environment_plane_modeling.h.
message_filters::Subscriber<sensor_msgs::PointCloud2> jsk_pcl_ros::EnvironmentPlaneModeling::sub_cloud_ [protected] |
Definition at line 215 of file environment_plane_modeling.h.
message_filters::Subscriber<jsk_recognition_msgs::ModelCoefficientsArray> jsk_pcl_ros::EnvironmentPlaneModeling::sub_coefficients_ [protected] |
Definition at line 219 of file environment_plane_modeling.h.
message_filters::Subscriber<sensor_msgs::PointCloud2> jsk_pcl_ros::EnvironmentPlaneModeling::sub_full_cloud_ [protected] |
Definition at line 216 of file environment_plane_modeling.h.
message_filters::Subscriber<jsk_recognition_msgs::ClusterPointIndices> jsk_pcl_ros::EnvironmentPlaneModeling::sub_indices_ [protected] |
Definition at line 217 of file environment_plane_modeling.h.
Definition at line 220 of file environment_plane_modeling.h.
Definition at line 221 of file environment_plane_modeling.h.
message_filters::Subscriber<jsk_recognition_msgs::PolygonArray> jsk_pcl_ros::EnvironmentPlaneModeling::sub_polygons_ [protected] |
Definition at line 218 of file environment_plane_modeling.h.
boost::shared_ptr<message_filters::Synchronizer<SyncPolicy> > jsk_pcl_ros::EnvironmentPlaneModeling::sync_ [protected] |
Definition at line 214 of file environment_plane_modeling.h.
Definition at line 232 of file environment_plane_modeling.h.
The documentation for this class was generated from the following files: