#include <pcl/common/distances.h>
Include dependency graph for point_types.hpp:
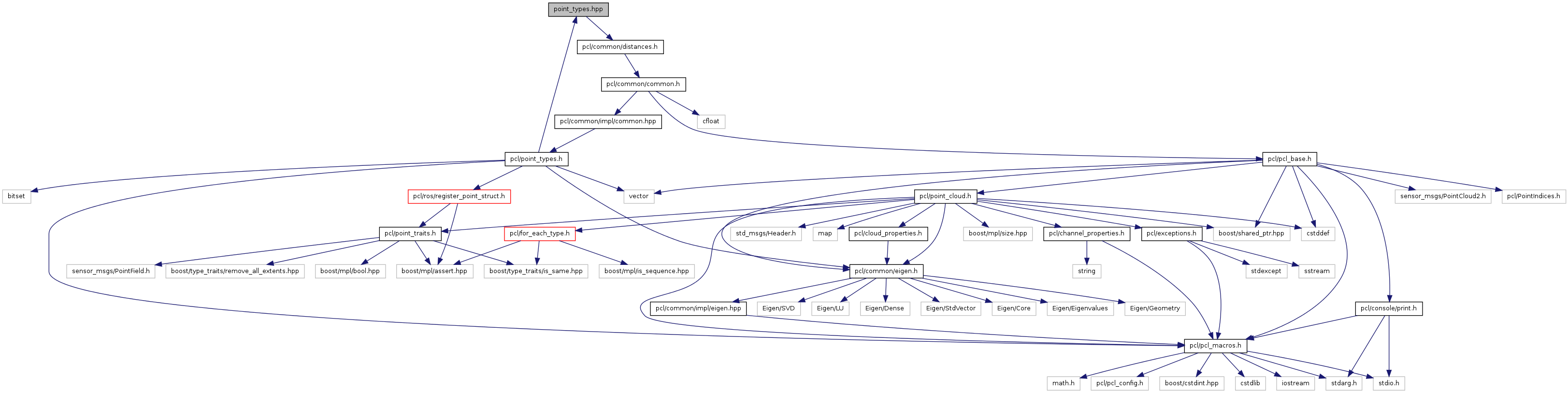
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | pcl::_Axis |
| A point structure representing an Axis using its normal coordinates. (SSE friendly) More... | |
| struct | pcl::_Normal |
| A point structure representing normal coordinates and the surface curvature estimate. (SSE friendly) More... | |
| struct | pcl::_PointNormal |
| A point structure representing Euclidean xyz coordinates, together with normal coordinates and the surface curvature estimate. (SSE friendly) More... | |
| struct | pcl::_PointSurfel |
| A surfel, that is, a point structure representing Euclidean xyz coordinates, together with normal coordinates, a RGBA color, a radius, a confidence value and the surface curvature estimate. More... | |
| struct | pcl::_PointWithRange |
| A point structure representing Euclidean xyz coordinates, padded with an extra range float. More... | |
| struct | pcl::_PointWithScale |
| A point structure representing a 3-D position and scale. More... | |
| struct | pcl::_PointWithViewpoint |
| struct | pcl::_PointXYZ |
| struct | pcl::_PointXYZHSV |
| struct | pcl::_PointXYZI |
| A point structure representing Euclidean xyz coordinates, and the intensity value. More... | |
| struct | pcl::_PointXYZINormal |
| A point structure representing Euclidean xyz coordinates, intensity, together with normal coordinates and the surface curvature estimate. More... | |
| struct | pcl::_PointXYZL |
| struct | pcl::_PointXYZRGB |
| struct | pcl::_PointXYZRGBA |
| A point structure representing Euclidean xyz coordinates, and the RGBA color. More... | |
| struct | pcl::_PointXYZRGBL |
| struct | pcl::_PointXYZRGBNormal |
| A point structure representing Euclidean xyz coordinates, and the RGB color, together with normal coordinates and the surface curvature estimate. Due to historical reasons (PCL was first developed as a ROS package), the RGB information is packed into an integer and casted to a float. This is something we wish to remove in the near future, but in the meantime, the following code snippet should help you pack and unpack RGB colors in your PointXYZRGB structure: More... | |
| struct | pcl::_ReferenceFrame |
| A structure representing the Local Reference Frame of a point. More... | |
| struct | pcl::Axis |
| struct | pcl::BorderDescription |
| A structure to store if a point in a range image lies on a border between an obstacle and the background. More... | |
| struct | pcl::Boundary |
| A point structure representing a description of whether a point is lying on a surface boundary or not. More... | |
| struct | pcl::ESFSignature640 |
| A point structure representing the Ensemble of Shape Functions (ESF). More... | |
| struct | pcl::FPFHSignature33 |
| A point structure representing the Fast Point Feature Histogram (FPFH). More... | |
| struct | pcl::GFPFHSignature16 |
| A point structure representing the GFPFH descriptor with 16 bins. More... | |
| struct | pcl::Histogram< N > |
| A point structure representing an N-D histogram. More... | |
| struct | pcl::IntensityGradient |
| A point structure representing the intensity gradient of an XYZI point cloud. More... | |
| struct | pcl::InterestPoint |
| A point structure representing an interest point with Euclidean xyz coordinates, and an interest value. More... | |
| struct | pcl::Label |
| struct | pcl::MomentInvariants |
| A point structure representing the three moment invariants. More... | |
| struct | pcl::Narf36 |
| A point structure representing the Narf descriptor. More... | |
| struct | pcl::Normal |
| struct | pcl::NormalBasedSignature12 |
| A point structure representing the Normal Based Signature for a feature matrix of 4-by-3. More... | |
| struct | pcl::PFHRGBSignature250 |
| A point structure representing the Point Feature Histogram with colors (PFHRGB). More... | |
| struct | pcl::PFHSignature125 |
| A point structure representing the Point Feature Histogram (PFH). More... | |
| struct | pcl::PointNormal |
| struct | pcl::PointSurfel |
| struct | pcl::PointWithRange |
| struct | pcl::PointWithScale |
| struct | pcl::PointWithViewpoint |
| A point structure representing Euclidean xyz coordinates together with the viewpoint from which it was seen. More... | |
| struct | pcl::PointXY |
| A 2D point structure representing Euclidean xy coordinates. More... | |
| struct | pcl::PointXYZ |
| A point structure representing Euclidean xyz coordinates. (SSE friendly) More... | |
| struct | pcl::PointXYZHSV |
| struct | pcl::PointXYZI |
| struct | pcl::PointXYZINormal |
| struct | pcl::PointXYZL |
| struct | pcl::PointXYZRGB |
| A point structure representing Euclidean xyz coordinates, and the RGB color. More... | |
| struct | pcl::PointXYZRGBA |
| struct | pcl::PointXYZRGBL |
| struct | pcl::PointXYZRGBNormal |
| struct | pcl::PPFRGBSignature |
| A point structure for storing the Point Pair Color Feature (PPFRGB) values. More... | |
| struct | pcl::PPFSignature |
| A point structure for storing the Point Pair Feature (PPF) values. More... | |
| struct | pcl::PrincipalCurvatures |
| A point structure representing the principal curvatures and their magnitudes. More... | |
| struct | pcl::PrincipalRadiiRSD |
| A point structure representing the minimum and maximum surface radii (in meters) computed using RSD. More... | |
| struct | pcl::ReferenceFrame |
| struct | pcl::RGB |
| A structure representing RGB color information. More... | |
| struct | pcl::ShapeContext |
| A point structure representing a Shape Context. More... | |
| struct | pcl::SHOT |
| A point structure representing the generic Signature of Histograms of OrienTations (SHOT). More... | |
| struct | pcl::SHOT1344 |
| A point structure representing the generic Signature of Histograms of OrienTations (SHOT) - shape+color. More... | |
| struct | pcl::SHOT352 |
| A point structure representing the generic Signature of Histograms of OrienTations (SHOT) - shape only. More... | |
| struct | pcl::VFHSignature308 |
| A point structure representing the Viewpoint Feature Histogram (VFH). More... | |
Namespaces | |
| namespace | pcl |
Defines | |
| #define | PCL_ADD_NORMAL4D |
| #define | PCL_ADD_POINT4D |
| #define | PCL_ADD_RGB |
| #define | PCL_FEATURE_POINT_TYPES |
| #define | PCL_NORMAL_POINT_TYPES |
| #define | PCL_POINT_TYPES |
| #define | PCL_XYZ_POINT_TYPES |
| #define | PCL_XYZL_POINT_TYPES |
Typedefs | |
| typedef Eigen::Map < Eigen::Array3f > | pcl::Array3fMap |
| typedef const Eigen::Map < const Eigen::Array3f > | pcl::Array3fMapConst |
| typedef Eigen::Map < Eigen::Array4f, Eigen::Aligned > | pcl::Array4fMap |
| typedef const Eigen::Map < const Eigen::Array4f, Eigen::Aligned > | pcl::Array4fMapConst |
| typedef Eigen::Map < Eigen::Vector3f > | pcl::Vector3fMap |
| typedef const Eigen::Map < const Eigen::Vector3f > | pcl::Vector3fMapConst |
| typedef Eigen::Map < Eigen::Vector4f, Eigen::Aligned > | pcl::Vector4fMap |
| typedef const Eigen::Map < const Eigen::Vector4f, Eigen::Aligned > | pcl::Vector4fMapConst |
Functions | |
| template<typename PointT > | |
| bool | pcl::isFinite (const PointT &pt) |
| template<> | |
| bool | pcl::isFinite< pcl::Normal > (const pcl::Normal &n) |
| std::ostream & | pcl::operator<< (std::ostream &os, const PointXYZ &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const PointXYZI &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const PointXYZL &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const Label &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const PointXYZRGBA &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const PointXYZRGB &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const PointXYZRGBL &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const PointXYZHSV &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const PointXY &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const InterestPoint &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const Normal &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const Axis &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const _Axis &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const PointNormal &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const PointXYZRGBNormal &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const PointXYZINormal &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const PointWithRange &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const PointWithViewpoint &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const MomentInvariants &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const PrincipalRadiiRSD &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const Boundary &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const PrincipalCurvatures &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const PFHSignature125 &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const PFHRGBSignature250 &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const PPFSignature &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const PPFRGBSignature &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const NormalBasedSignature12 &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const ShapeContext &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const SHOT &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const SHOT352 &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const SHOT1344 &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const ReferenceFrame &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const FPFHSignature33 &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const VFHSignature308 &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const ESFSignature640 &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const GFPFHSignature16 &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const Narf36 &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const BorderDescription &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const IntensityGradient &p) |
| template<int N> | |
| std::ostream & | pcl::operator<< (std::ostream &os, const Histogram< N > &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const PointWithScale &p) |
| std::ostream & | pcl::operator<< (std::ostream &os, const PointSurfel &p) |
| pcl::PCL_DEPRECATED (inline std::ostream &operator<< (std::ostream &os, const SHOT &p),"SHOT POINT IS DEPRECATED, USE SHOT352 FOR SHAPE AND SHOT1344 FOR SHAPE+COLOR INSTEAD") | |
Variables | |
| struct pcl::_PointXYZHSV | pcl::EIGEN_ALIGN16 |
Define Documentation
| #define PCL_ADD_NORMAL4D |
Value:
EIGEN_ALIGN16 \
union { \
float data_n[4]; \
float normal[3]; \
struct { \
float normal_x; \
float normal_y; \
float normal_z; \
}; \
}; \
inline Eigen::Map<Eigen::Vector3f> getNormalVector3fMap () { return (Eigen::Vector3f::Map (data_n)); } \
inline const Eigen::Map<const Eigen::Vector3f> getNormalVector3fMap () const { return (Eigen::Vector3f::Map (data_n)); } \
inline Eigen::Map<Eigen::Vector4f, Eigen::Aligned> getNormalVector4fMap () { return (Eigen::Vector4f::MapAligned (data_n)); } \
inline const Eigen::Map<const Eigen::Vector4f, Eigen::Aligned> getNormalVector4fMap () const { return (Eigen::Vector4f::MapAligned (data_n)); }
Definition at line 141 of file point_types.hpp.
| #define PCL_ADD_POINT4D |
Value:
EIGEN_ALIGN16 \
union { \
float data[4]; \
struct { \
float x; \
float y; \
float z; \
}; \
}; \
inline Eigen::Map<Eigen::Vector3f> getVector3fMap () { return (Eigen::Vector3f::Map (data)); } \
inline const Eigen::Map<const Eigen::Vector3f> getVector3fMap () const { return (Eigen::Vector3f::Map (data)); } \
inline Eigen::Map<Eigen::Vector4f, Eigen::Aligned> getVector4fMap () { return (Eigen::Vector4f::MapAligned (data)); } \
inline const Eigen::Map<const Eigen::Vector4f, Eigen::Aligned> getVector4fMap () const { return (Eigen::Vector4f::MapAligned (data)); } \
inline Eigen::Map<Eigen::Array3f> getArray3fMap () { return (Eigen::Array3f::Map (data)); } \
inline const Eigen::Map<const Eigen::Array3f> getArray3fMap () const { return (Eigen::Array3f::Map (data)); } \
inline Eigen::Map<Eigen::Array4f, Eigen::Aligned> getArray4fMap () { return (Eigen::Array4f::MapAligned (data)); } \
inline const Eigen::Map<const Eigen::Array4f, Eigen::Aligned> getArray4fMap () const { return (Eigen::Array4f::MapAligned (data)); }
Definition at line 122 of file point_types.hpp.
| #define PCL_ADD_RGB |
Value:
union \
{ \
union \
{ \
struct \
{ \
uint8_t b; \
uint8_t g; \
uint8_t r; \
uint8_t a; \
}; \
float rgb; \
}; \
uint32_t rgba; \
};
Definition at line 157 of file point_types.hpp.
| #define PCL_FEATURE_POINT_TYPES |
Value:
(pcl::PFHSignature125) \ (pcl::PFHRGBSignature250) \ (pcl::PPFSignature) \ (pcl::PPFRGBSignature) \ (pcl::NormalBasedSignature12) \ (pcl::FPFHSignature33) \ (pcl::VFHSignature308) \ (pcl::ESFSignature640) \ (pcl::Narf36)
Definition at line 108 of file point_types.hpp.
| #define PCL_NORMAL_POINT_TYPES |
Value:
Definition at line 101 of file point_types.hpp.
| #define PCL_POINT_TYPES |
Definition at line 42 of file point_types.hpp.
| #define PCL_XYZ_POINT_TYPES |
Value:
(pcl::PointXYZ) \ (pcl::PointXYZI) \ (pcl::PointXYZL) \ (pcl::PointXYZRGBA) \ (pcl::PointXYZRGB) \ (pcl::PointXYZRGBL) \ (pcl::PointXYZHSV) \ (pcl::InterestPoint) \ (pcl::PointNormal) \ (pcl::PointXYZRGBNormal) \ (pcl::PointXYZINormal) \ (pcl::PointWithRange) \ (pcl::PointWithViewpoint) \ (pcl::PointWithScale)
Definition at line 78 of file point_types.hpp.
| #define PCL_XYZL_POINT_TYPES |
Value:
Definition at line 95 of file point_types.hpp.