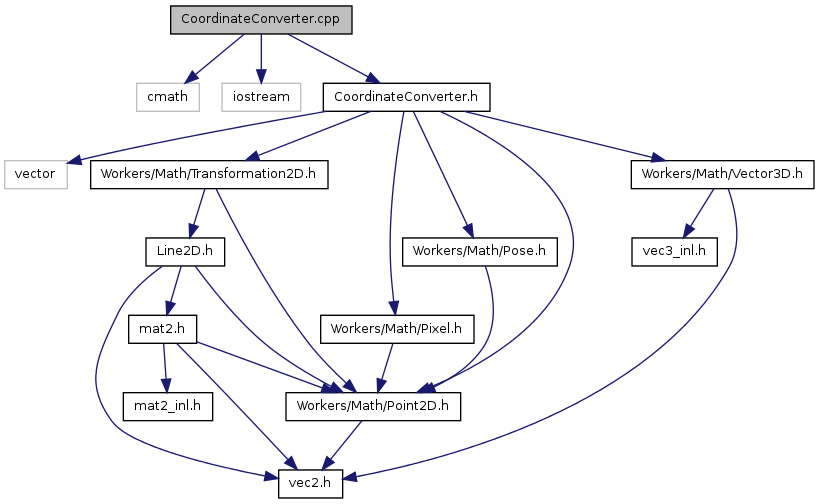
Include dependency graph for CoordinateConverter.cpp:
Go to the source code of this file.
Defines | |
| #define | THIS CoordinateConverter |
Define Documentation
| #define THIS CoordinateConverter |
COORDINATE SYSTEMS:
nativeLaser laser laser3D simLaser3D robot world map
Definition at line 29 of file CoordinateConverter.cpp.