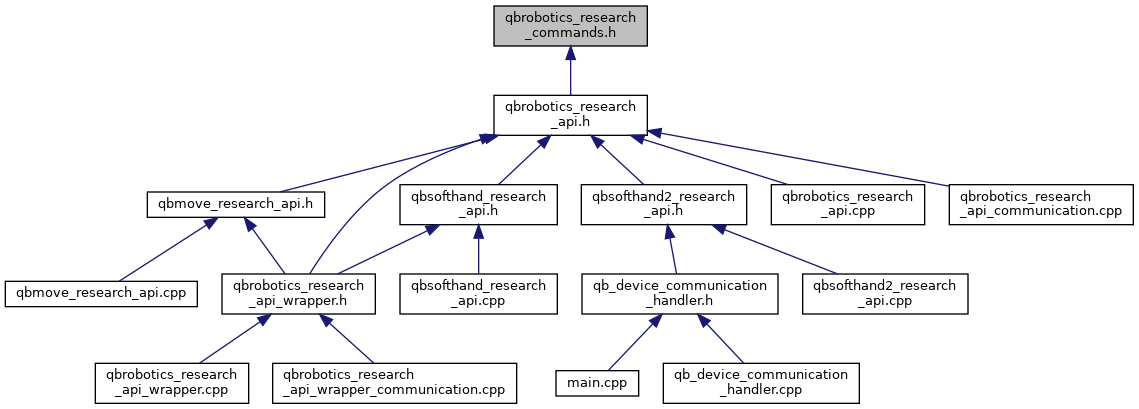
Go to the source code of this file.
Macros | |
| #define | API_VERSION "7.1.0" |
| #define | PARAM_BYTE_SLOT 50 |
| #define | PARAM_MENU_SLOT 150 |
qbrobotics device information types | |
| #define | GET_SD_DATA 3 |
| Read Usage Data from SD file. More... | |
| #define | GET_SD_PARAM 2 |
| Read Firmware Parameters from SD file. More... | |
| #define | INFO_ALL 0 |
| All system information. More... | |
| #define | INFO_READING 1 |
| Cycles information. More... | |
Macro Definition Documentation
◆ API_VERSION
| #define API_VERSION "7.1.0" |
Definition at line 31 of file qbrobotics_research_commands.h.
◆ GET_SD_DATA
| #define GET_SD_DATA 3 |
Read Usage Data from SD file.
Definition at line 41 of file qbrobotics_research_commands.h.
◆ GET_SD_PARAM
| #define GET_SD_PARAM 2 |
Read Firmware Parameters from SD file.
Definition at line 40 of file qbrobotics_research_commands.h.
◆ INFO_ALL
| #define INFO_ALL 0 |
All system information.
Definition at line 38 of file qbrobotics_research_commands.h.
◆ INFO_READING
| #define INFO_READING 1 |
Cycles information.
Definition at line 39 of file qbrobotics_research_commands.h.
◆ PARAM_BYTE_SLOT
| #define PARAM_BYTE_SLOT 50 |
Definition at line 33 of file qbrobotics_research_commands.h.
◆ PARAM_MENU_SLOT
| #define PARAM_MENU_SLOT 150 |
Definition at line 34 of file qbrobotics_research_commands.h.
Enumeration Type Documentation
◆ acknowledgment_values
| Enumerator | |
|---|---|
| ACK_ERROR | |
| ACK_OK | |
Definition at line 171 of file qbrobotics_research_commands.h.
◆ additional_command
| enum additional_command |
Definition at line 91 of file qbrobotics_research_commands.h.
◆ data_types
| enum data_types |
| Enumerator | |
|---|---|
| TYPE_FLAG | |
| TYPE_INT8 | |
| TYPE_UINT8 | |
| TYPE_INT16 | |
| TYPE_UINT16 | |
| TYPE_INT32 | |
| TYPE_UINT32 | |
| TYPE_FLOAT | |
| TYPE_DOUBLE | |
| TYPE_STRING | |
Definition at line 176 of file qbrobotics_research_commands.h.
◆ motor_supply_tipe
| enum motor_supply_tipe |
| Enumerator | |
|---|---|
| MAXON_24V | |
| MAXON_12V | |
Definition at line 166 of file qbrobotics_research_commands.h.
◆ qbmove_command
| enum qbmove_command |
Definition at line 46 of file qbrobotics_research_commands.h.
◆ qbmove_control_mode
| enum qbmove_control_mode |
Definition at line 157 of file qbrobotics_research_commands.h.
◆ qbmove_input_mode
| enum qbmove_input_mode |
Definition at line 147 of file qbrobotics_research_commands.h.
◆ qbmove_parameter
| enum qbmove_parameter |
Definition at line 104 of file qbrobotics_research_commands.h.
◆ qbmove_resolution
| enum qbmove_resolution |
| Enumerator | |
|---|---|
| RESOLUTION_360 | |
| RESOLUTION_720 | |
| RESOLUTION_1440 | |
| RESOLUTION_2880 | |
| RESOLUTION_5760 | |
| RESOLUTION_11520 | |
| RESOLUTION_23040 | |
| RESOLUTION_46080 | |
| RESOLUTION_92160 | |
Definition at line 135 of file qbrobotics_research_commands.h.