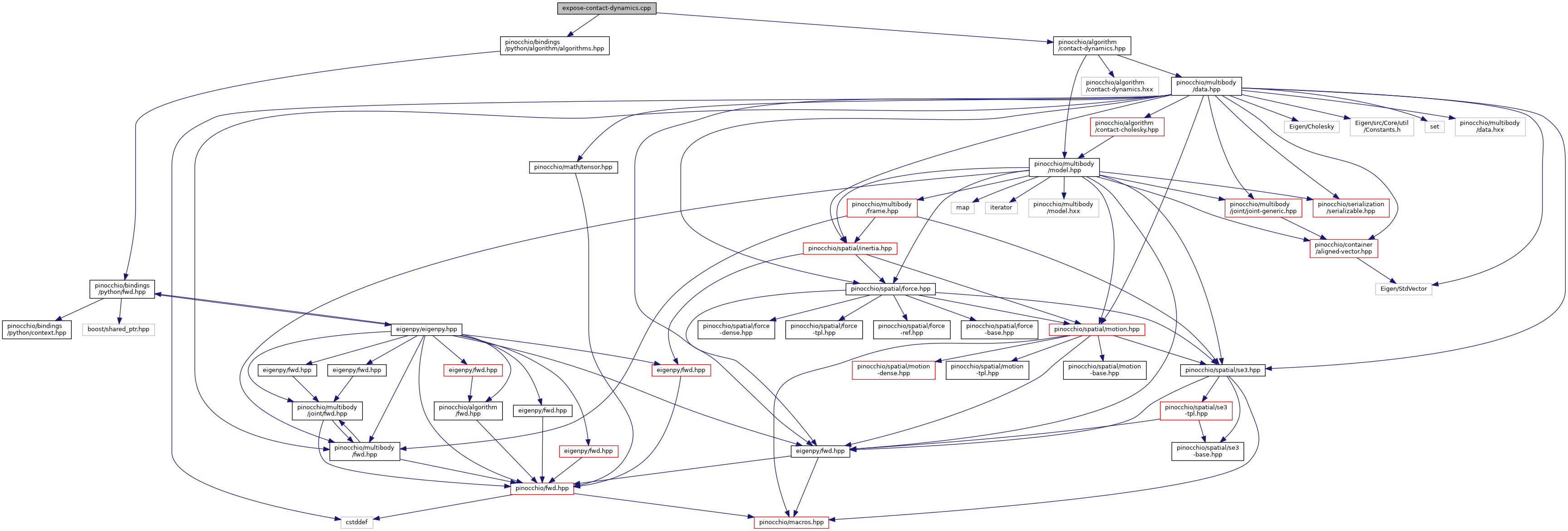
#include "pinocchio/bindings/python/algorithm/algorithms.hpp"#include "pinocchio/algorithm/contact-dynamics.hpp"#include "pinocchio/bindings/python/utils/model-checker.hpp"
Include dependency graph for expose-contact-dynamics.cpp:
Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
| pinocchio::python | |
Functions | |
| static context::MatrixXs | pinocchio::python::computeKKTContactDynamicMatrixInverse_proxy (const context::Model &model, context::Data &data, const context::VectorXs &q, const context::MatrixXs &J, const context::Scalar mu=context::Scalar(0)) |
| void | pinocchio::python::exposeContactDynamics () |
| static const context::VectorXs | pinocchio::python::forwardDynamics_proxy (const context::Model &model, context::Data &data, const context::VectorXs &q, const context::VectorXs &v, const context::VectorXs &tau, const context::MatrixXs &J, const context::VectorXs &gamma, const context::Scalar inv_damping=context::Scalar(0.0)) |
| static const context::VectorXs | pinocchio::python::forwardDynamics_proxy_no_q (const context::Model &model, context::Data &data, const context::VectorXs &tau, const context::MatrixXs &J, const context::VectorXs &gamma, const context::Scalar inv_damping=context::Scalar(0.0)) |
| static const context::MatrixXs | pinocchio::python::getKKTContactDynamicMatrixInverse_proxy (const context::Model &model, context::Data &data, const context::MatrixXs &J) |
| static const context::VectorXs | pinocchio::python::impulseDynamics_proxy (const context::Model &model, context::Data &data, const context::VectorXs &q, const context::VectorXs &v_before, const context::MatrixXs &J, const context::Scalar r_coeff=context::Scalar(0.), const context::Scalar inv_damping=context::Scalar(0.)) |
| static const context::VectorXs | pinocchio::python::impulseDynamics_proxy_no_q (const context::Model &model, context::Data &data, const context::VectorXs &v_before, const context::MatrixXs &J, const context::Scalar r_coeff=context::Scalar(0.), const context::Scalar inv_damping=context::Scalar(0.)) |