unit tests for testFactorJacobians and testExpressionJacobians More...
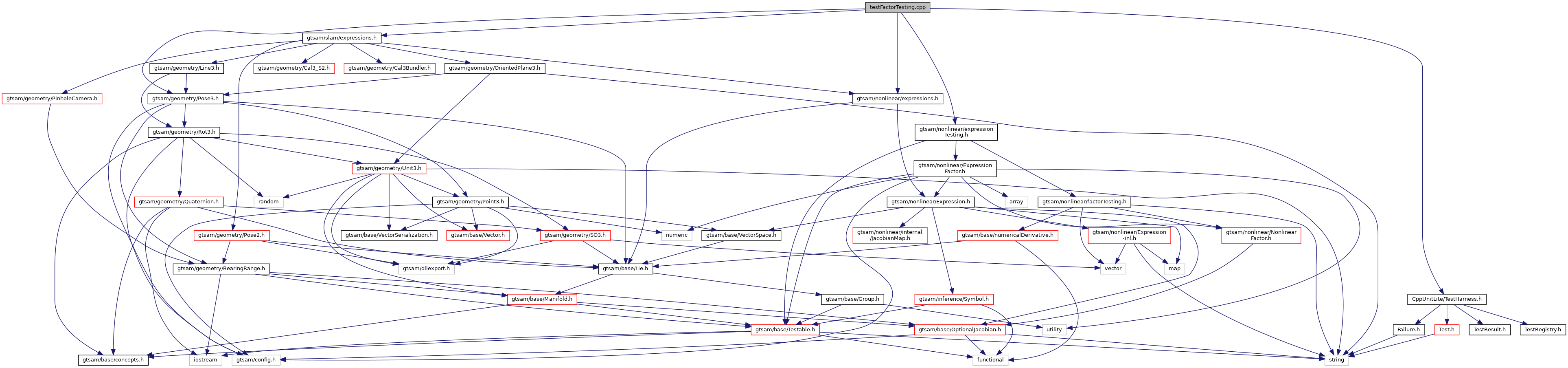
#include <gtsam/geometry/Pose3.h>#include <gtsam/nonlinear/expressions.h>#include <gtsam/nonlinear/expressionTesting.h>#include <gtsam/slam/expressions.h>#include <CppUnitLite/TestHarness.h>
Include dependency graph for testFactorTesting.cpp:
Go to the source code of this file.
Classes | |
| class | ScaledVelocityFunctor |
Functions | |
| Vector3 | bodyVelocity (const Pose3 &w_t_b, const Vector3 &vec_w, OptionalJacobian< 3, 6 > Hpose={}, OptionalJacobian< 3, 3 > Hvel={}) |
| int | main () |
| TEST (ExpressionTesting, Issue16) | |
Detailed Description
unit tests for testFactorJacobians and testExpressionJacobians
- Date
- September 18, 2014
Definition in file testFactorTesting.cpp.
Function Documentation
◆ bodyVelocity()
| Vector3 bodyVelocity | ( | const Pose3 & | w_t_b, |
| const Vector3 & | vec_w, | ||
| OptionalJacobian< 3, 6 > | Hpose = {}, |
||
| OptionalJacobian< 3, 3 > | Hvel = {} |
||
| ) |
Definition at line 29 of file testFactorTesting.cpp.
◆ main()
| int main | ( | ) |
Definition at line 102 of file testFactorTesting.cpp.
◆ TEST()
| TEST | ( | ExpressionTesting | , |
| Issue16 | |||
| ) |
Definition at line 69 of file testFactorTesting.cpp.