|
| bool | gtsam::assert_equal (const ConstSubVector &expected, const ConstSubVector &actual, double tol) |
| |
| bool | gtsam::assert_equal (const SubVector &expected, const SubVector &actual, double tol) |
| |
| bool | gtsam::assert_equal (const Vector &expected, const Vector &actual, double tol) |
| |
| bool | gtsam::assert_inequal (const Vector &expected, const Vector &actual, double tol) |
| |
| Vector | gtsam::concatVectors (const std::list< Vector > &vs) |
| |
| Vector | gtsam::concatVectors (size_t nrVectors,...) |
| |
| template<class V1 , class V2 > |
| double | gtsam::dot (const V1 &a, const V2 &b) |
| |
| Vector | gtsam::ediv_ (const Vector &a, const Vector &b) |
| |
| bool | gtsam::equal (const Vector &vec1, const Vector &vec2) |
| |
| bool | gtsam::equal (const Vector &vec1, const Vector &vec2, double tol) |
| |
| bool | gtsam::equal_with_abs_tol (const SubVector &vec1, const SubVector &vec2, double tol) |
| |
| bool | gtsam::equal_with_abs_tol (const Vector &vec1, const Vector &vec2, double tol) |
| |
| bool | gtsam::fpEqual (double a, double b, double tol, bool check_relative_also) |
| |
| bool | gtsam::greaterThanOrEqual (const Vector &vec1, const Vector &vec2) |
| |
| pair< double, Vector > | gtsam::house (const Vector &x) |
| |
| double | gtsam::houseInPlace (Vector &v) |
| |
| template<class V1 , class V2 > |
| double | gtsam::inner_prod (const V1 &a, const V2 &b) |
| |
| bool | gtsam::linear_dependent (const Vector &vec1, const Vector &vec2, double tol) |
| |
| bool | gtsam::operator== (const Vector &vec1, const Vector &vec2) |
| |
| GTSAM_EXPORT void | gtsam::print (const Vector &v, const std::string &s, std::ostream &stream) |
| |
| GTSAM_EXPORT void | gtsam::print (const Vector &v, const std::string &s="") |
| |
| GTSAM_EXPORT void | gtsam::save (const Vector &A, const std::string &s, const std::string &filename) |
| |
| pair< Vector, double > | gtsam::weightedPseudoinverse (const Vector &a, const Vector &weights) |
| |
| double | gtsam::weightedPseudoinverse (const Vector &a, const Vector &weights, Vector &pseudo) |
| |
typedef and functions to augment Eigen's VectorXd
- Author
- Kai Ni
-
Frank Dellaert
-
Alex Hagiopol
-
Varun Agrawal
-
Fan Jiang
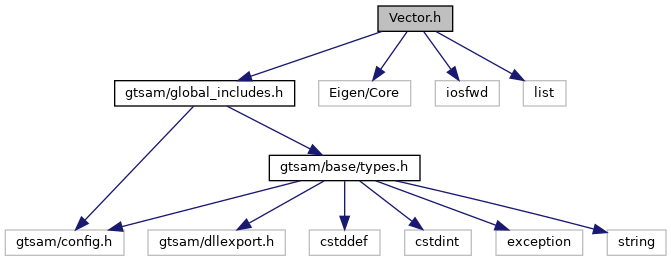
Definition in file Vector.h.