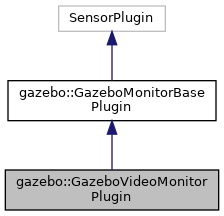
Provides a ROS interface for creating videos that are useful for capturing the operation of a robot. More...
#include <gazebo_video_monitor_plugin.h>
Public Member Functions | |
| GazeboVideoMonitorPlugin () | |
| virtual void | Load (sensors::SensorPtr _sensor, sdf::ElementPtr _sdf) override |
| virtual void | Reset () override |
| virtual | ~GazeboVideoMonitorPlugin () override |
 Public Member Functions inherited from gazebo::GazeboMonitorBasePlugin Public Member Functions inherited from gazebo::GazeboMonitorBasePlugin | |
| GazeboMonitorBasePlugin (const std::string &name) | |
| virtual void | Init () override |
| virtual | ~GazeboMonitorBasePlugin () override |
Private Member Functions | |
| virtual void | initRos () override |
| virtual void | onNewImages (const ImageDataPtrVector &images) override |
| bool | startRecordingServiceCallback (gazebo_video_monitor_msgs::StartGvmRecordingRequest &req, gazebo_video_monitor_msgs::StartGvmRecordingResponse &res) |
| std::string | stopRecording (bool discard, std::string filename="") |
| bool | stopRecordingServiceCallback (gazebo_video_monitor_msgs::StopRecordingRequest &req, gazebo_video_monitor_msgs::StopRecordingResponse &res) |
Private Attributes | |
| const std::vector< std::string > | camera_names_ |
| bool | disable_window_ |
| GazeboVideoRecorderPtr | recorder_ |
| std::mutex | recorder_mutex_ |
| bool | world_as_main_view_ |
Additional Inherited Members | |
| Public Types inherited from gazebo::GazeboMonitorBasePlugin | |
| using | ImageDataPtrVector = std::vector< sensors::GvmMulticameraSensor::ImageDataPtr > |
| Protected Member Functions inherited from gazebo::GazeboMonitorBasePlugin | |
| RefModelConfigConstPtr | getCameraRefConfig (const std::string &name) const |
| void | initialize () |
| Protected Attributes inherited from gazebo::GazeboMonitorBasePlugin | |
| const std::string | logger_prefix_ |
| ros::NodeHandlePtr | nh_ |
| boost::filesystem::path | save_path_ |
| sdf::ElementPtr | sdf_ |
| sensors::GvmMulticameraSensorPtr | sensor_ |
| ros::ServiceServer | start_recording_service_ |
| ros::ServiceServer | stop_recording_service_ |
| physics::WorldPtr | world_ |
Detailed Description
Provides a ROS interface for creating videos that are useful for capturing the operation of a robot.
Creates videos that present two views of the gazebo world: one stationary (world) view, and one view that is attached to a (robot) model. Additional metadata are shown in the video, like real time, sim time, and elapsed real time since the start of the recording.
- Note
- The parent sensor should hold two cameras with the names world_camera and robot_camera. By default, world_camera is attached to the parent link of the sensor. robot_camera is user-configurable.
Expects the following configuration (extends the configuration of GazeboMonitorBasePlugin):- startRecordingService: name of the service for starting a recording
- stopRecordingService: name of the service for stopping and saving a recording
- recorder: configuration of the video recorder (see GazeboVideoRecorder)
- cameraReference: reference model configuration with a name attribute pointing to the robot camera (see parseRefModelConfig)
Definition at line 55 of file gazebo_video_monitor_plugin.h.
Constructor & Destructor Documentation
◆ GazeboVideoMonitorPlugin()
| gazebo::GazeboVideoMonitorPlugin::GazeboVideoMonitorPlugin | ( | ) |
Definition at line 25 of file gazebo_video_monitor_plugin.cpp.
◆ ~GazeboVideoMonitorPlugin()
|
overridevirtual |
Definition at line 29 of file gazebo_video_monitor_plugin.cpp.
Member Function Documentation
◆ initRos()
|
overrideprivatevirtual |
Reimplemented from gazebo::GazeboMonitorBasePlugin.
Definition at line 59 of file gazebo_video_monitor_plugin.cpp.
◆ Load()
|
overridevirtual |
Reimplemented from gazebo::GazeboMonitorBasePlugin.
Definition at line 31 of file gazebo_video_monitor_plugin.cpp.
◆ onNewImages()
|
overrideprivatevirtual |
Implements gazebo::GazeboMonitorBasePlugin.
Definition at line 81 of file gazebo_video_monitor_plugin.cpp.
◆ Reset()
|
overridevirtual |
Definition at line 54 of file gazebo_video_monitor_plugin.cpp.
◆ startRecordingServiceCallback()
|
private |
Definition at line 97 of file gazebo_video_monitor_plugin.cpp.
◆ stopRecording()
|
private |
Definition at line 91 of file gazebo_video_monitor_plugin.cpp.
◆ stopRecordingServiceCallback()
|
private |
Definition at line 121 of file gazebo_video_monitor_plugin.cpp.
Member Data Documentation
◆ camera_names_
|
private |
Definition at line 73 of file gazebo_video_monitor_plugin.h.
◆ disable_window_
|
private |
Definition at line 77 of file gazebo_video_monitor_plugin.h.
◆ recorder_
|
private |
Definition at line 75 of file gazebo_video_monitor_plugin.h.
◆ recorder_mutex_
|
private |
Definition at line 76 of file gazebo_video_monitor_plugin.h.
◆ world_as_main_view_
|
private |
Definition at line 78 of file gazebo_video_monitor_plugin.h.
The documentation for this class was generated from the following files: