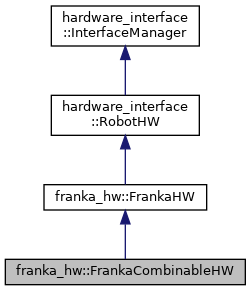
A hardware class for a Panda robot based on the ros_control framework. More...
#include <franka_combinable_hw.h>
Public Member Functions | |
| bool | checkForConflict (const std::list< hardware_interface::ControllerInfo > &info) const override |
| Checks whether a requested controller can be run, based on the resources and interfaces it claims. More... | |
| void | connect () override |
| Create a libfranka robot, connecting the hardware class to the master controller. More... | |
| void | control (const std::function< bool(const ros::Time &, const ros::Duration &)> &ros_callback=[](const ros::Time &, const ros::Duration &) { return true;}) override |
| Runs the currently active controller in a realtime loop. More... | |
| bool | controllerNeedsReset () const noexcept |
| Returns whether the controller needs to be reset e.g. More... | |
| bool | disconnect () override |
| Tries to disconnect the hardware class from the robot, freeing it for e.g. More... | |
| FrankaCombinableHW () | |
| Creates an instance of FrankaCombinableHW. More... | |
| std::string | getArmID () const noexcept |
| Getter method for the arm_id which is used to distinguish between multiple instances of FrankaCombinableHW. More... | |
| bool | hasError () const noexcept |
| Getter for the error flag of the class. More... | |
| bool | init (ros::NodeHandle &root_nh, ros::NodeHandle &robot_hw_nh) override |
| Initializes the FrankaHW class to be fully operational. More... | |
| void | initROSInterfaces (ros::NodeHandle &robot_hw_nh) override |
| Initializes the class in terms of ros_control interfaces. More... | |
| void | read (const ros::Time &, const ros::Duration &) override |
| Reads data from the franka robot. More... | |
| void | resetError () |
| Recovers the libfranka robot, resets the error flag and publishes the error state. More... | |
| void | triggerError () |
| Triggers a stop of the controlLoop. More... | |
| void | write (const ros::Time &, const ros::Duration &period) override |
| Writes data to the franka robot. More... | |
 Public Member Functions inherited from franka_hw::FrankaHW Public Member Functions inherited from franka_hw::FrankaHW | |
| virtual void | checkJointLimits () |
| Checks the proximity of each joint to its joint position limits and prints a warning whenever a joint is close to a limit. More... | |
| virtual bool | connected () |
| Checks whether the hardware class is connected to a robot. More... | |
| virtual bool | controllerActive () const noexcept |
| Indicates whether there is an active controller. More... | |
| virtual void | doSwitch (const std::list< hardware_interface::ControllerInfo > &, const std::list< hardware_interface::ControllerInfo > &) override |
| Performs controller switching (real-time capable). More... | |
| virtual void | enforceLimits (const ros::Duration &period) |
| Enforces limits on position, velocity, and torque level. More... | |
| FrankaHW () | |
| Default constructor. More... | |
| virtual std::array< double, 7 > | getJointEffortCommand () const noexcept |
| Gets the current joint torque command. More... | |
| virtual std::array< double, 7 > | getJointPositionCommand () const noexcept |
| Gets the current joint position command. More... | |
| virtual std::array< double, 7 > | getJointVelocityCommand () const noexcept |
| Gets the current joint velocity command. More... | |
| virtual bool | initParameters (ros::NodeHandle &root_nh, ros::NodeHandle &robot_hw_nh) |
| Reads the parameterization of the hardware class from the ROS parameter server (e.g. More... | |
| virtual bool | prepareSwitch (const std::list< hardware_interface::ControllerInfo > &start_list, const std::list< hardware_interface::ControllerInfo > &stop_list) override |
| Prepares switching between controllers (not real-time capable). More... | |
| virtual void | reset () |
| Resets the limit interfaces. More... | |
| virtual franka::Robot & | robot () const |
| Getter for the libfranka robot instance. More... | |
| virtual std::mutex & | robotMutex () |
| Getter for the mutex protecting access to the libfranka::robot class. More... | |
| virtual void | setupParameterCallbacks (ros::NodeHandle &robot_hw_nh) |
| Initializes the callbacks for on-the-fly reading the parameters for rate limiting, internal controllers and cutoff frequency. More... | |
| virtual void | update (const franka::RobotState &robot_state) |
| Updates the controller interfaces from the given robot state. More... | |
| virtual | ~FrankaHW () override=default |
| Public Member Functions inherited from hardware_interface::RobotHW | |
| virtual SwitchState | switchResult () const |
| virtual SwitchState | switchResult (const ControllerInfo &) const |
| virtual | ~RobotHW ()=default |
| Public Member Functions inherited from hardware_interface::InterfaceManager | |
| T * | get () |
| std::vector< std::string > | getInterfaceResources (std::string iface_type) const |
| std::vector< std::string > | getNames () const |
| void | registerInterface (T *iface) |
| void | registerInterfaceManager (InterfaceManager *iface_man) |
Private Member Functions | |
| void | controlLoop () |
| void | initRobot () override |
| Uses the robot_ip_ to connect to the robot via libfranka and loads the libfranka model. More... | |
| template<typename T > | |
| T | libfrankaUpdateCallback (const T &command, const franka::RobotState &robot_state, franka::Duration time_step) |
| void | publishErrorState (bool error) |
| bool | setRunFunction (const ControlMode &requested_control_mode, bool limit_rate, double cutoff_frequency, franka::ControllerMode internal_controller) override |
| Configures the run function which is used as libfranka control callback based on the requested control mode. More... | |
| void | setupServicesAndActionServers (ros::NodeHandle &node_handle) |
Private Attributes | |
| std::unique_ptr< std::thread > | control_loop_thread_ |
| std::atomic_bool | controller_needs_reset_ {false} |
| std::atomic_bool | error_recovered_ {false} |
| std::atomic_bool | has_error_ {false} |
| ros::Publisher | has_error_pub_ |
| std::unique_ptr< actionlib::SimpleActionServer< franka_msgs::ErrorRecoveryAction > > | recovery_action_server_ |
| ros::NodeHandle | robot_hw_nh_ |
| std::unique_ptr< ServiceContainer > | services_ |
Additional Inherited Members | |
| Public Types inherited from hardware_interface::RobotHW | |
| enum | SwitchState { SwitchState::DONE, SwitchState::ONGOING, SwitchState::ERROR } |
| Static Public Member Functions inherited from franka_hw::FrankaHW | |
| static bool | commandHasNaN (const franka::CartesianPose &command) |
| Checks a command for NaN values. More... | |
| static bool | commandHasNaN (const franka::CartesianVelocities &command) |
| Checks a command for NaN values. More... | |
| static bool | commandHasNaN (const franka::JointPositions &command) |
| Checks a command for NaN values. More... | |
| static bool | commandHasNaN (const franka::JointVelocities &command) |
| Checks a command for NaN values. More... | |
| static bool | commandHasNaN (const franka::Torques &command) |
| Checks a command for NaN values. More... | |
| static std::vector< double > | getCollisionThresholds (const std::string &name, const ros::NodeHandle &robot_hw_nh, const std::vector< double > &defaults) |
| Parses a set of collision thresholds from the parameter server. More... | |
| Protected Types inherited from franka_hw::FrankaHW | |
| using | Callback = std::function< bool(const franka::RobotState &, franka::Duration)> |
| Protected Types inherited from hardware_interface::InterfaceManager | |
| typedef std::vector< InterfaceManager * > | InterfaceManagerVector |
| typedef std::map< std::string, void * > | InterfaceMap |
| typedef std::map< std::string, std::vector< std::string > > | ResourceMap |
| typedef std::map< std::string, size_t > | SizeMap |
| Protected Member Functions inherited from franka_hw::FrankaHW | |
| template<typename T > | |
| T | controlCallback (const T &command, Callback ros_callback, const franka::RobotState &robot_state, franka::Duration time_step) |
| Callback for the libfranka control loop. More... | |
| virtual void | setupFrankaCartesianPoseInterface (franka::CartesianPose &pose_cartesian_command) |
| Configures and registers the command interface for Cartesian poses in ros_control. More... | |
| virtual void | setupFrankaCartesianVelocityInterface (franka::CartesianVelocities &velocity_cartesian_command) |
| Configures and registers the command interface for Cartesian velocities in ros_control. More... | |
| virtual void | setupFrankaModelInterface (franka::RobotState &robot_state) |
| Configures and registers the model interface offering kinematics and dynamics in ros_control. More... | |
| virtual void | setupFrankaStateInterface (franka::RobotState &robot_state) |
| Configures and registers the state interface offering the full franka::RobotState in ros_control. More... | |
| template<typename T > | |
| void | setupJointCommandInterface (std::array< double, 7 > &command, franka::RobotState &state, bool use_q_d, T &interface) |
| Configures and registers a joint command interface for positions velocities or efforts in ros_control. More... | |
| virtual void | setupJointStateInterface (franka::RobotState &robot_state) |
| Configures and registers the joint state interface in ros_control. More... | |
| template<typename T > | |
| void | setupLimitInterface (joint_limits_interface::JointLimitsInterface< T > &limit_interface, hardware_interface::JointCommandInterface &command_interface) |
| Configures a limit interface to enforce limits on effort, velocity or position level on joint commands. More... | |
| Static Protected Member Functions inherited from franka_hw::FrankaHW | |
| template<size_t size> | |
| static bool | arrayHasNaN (const std::array< double, size > &array) |
| Checks whether an array of doubles contains NaN values. More... | |
| Protected Attributes inherited from franka_hw::FrankaHW | |
| std::string | arm_id_ |
| CollisionConfig | collision_config_ |
| std::atomic_bool | controller_active_ {false} |
| ControlMode | current_control_mode_ = ControlMode::None |
| franka::Torques | effort_joint_command_libfranka_ |
| franka::Torques | effort_joint_command_ros_ |
| hardware_interface::EffortJointInterface | effort_joint_interface_ {} |
| joint_limits_interface::EffortJointSoftLimitsInterface | effort_joint_limit_interface_ {} |
| FrankaModelInterface | franka_model_interface_ {} |
| FrankaPoseCartesianInterface | franka_pose_cartesian_interface_ {} |
| FrankaStateInterface | franka_state_interface_ {} |
| FrankaVelocityCartesianInterface | franka_velocity_cartesian_interface_ {} |
| std::function< double()> | get_cutoff_frequency_ |
| std::function< franka::ControllerMode()> | get_internal_controller_ |
| std::function< bool()> | get_limit_rate_ |
| bool | initialized_ {false} |
| double | joint_limit_warning_threshold_ {0.1} |
| std::array< std::string, 7 > | joint_names_ |
| hardware_interface::JointStateInterface | joint_state_interface_ {} |
| std::mutex | libfranka_cmd_mutex_ |
| std::mutex | libfranka_state_mutex_ |
| std::unique_ptr< franka_hw::ModelBase > | model_ |
| franka::CartesianPose | pose_cartesian_command_libfranka_ |
| franka::CartesianPose | pose_cartesian_command_ros_ |
| franka::JointPositions | position_joint_command_libfranka_ |
| franka::JointPositions | position_joint_command_ros_ |
| hardware_interface::PositionJointInterface | position_joint_interface_ {} |
| joint_limits_interface::PositionJointSoftLimitsInterface | position_joint_limit_interface_ {} |
| franka::RealtimeConfig | realtime_config_ |
| std::unique_ptr< franka::Robot > | robot_ |
| std::string | robot_ip_ |
| std::mutex | robot_mutex_ |
| franka::RobotState | robot_state_libfranka_ {} |
| franka::RobotState | robot_state_ros_ {} |
| std::mutex | ros_cmd_mutex_ |
| std::mutex | ros_state_mutex_ |
| std::function< void(franka::Robot &, Callback)> | run_function_ |
| urdf::Model | urdf_model_ |
| franka::CartesianVelocities | velocity_cartesian_command_libfranka_ |
| franka::CartesianVelocities | velocity_cartesian_command_ros_ |
| franka::JointVelocities | velocity_joint_command_libfranka_ |
| franka::JointVelocities | velocity_joint_command_ros_ |
| hardware_interface::VelocityJointInterface | velocity_joint_interface_ {} |
| joint_limits_interface::VelocityJointSoftLimitsInterface | velocity_joint_limit_interface_ {} |
| Protected Attributes inherited from hardware_interface::InterfaceManager | |
| std::vector< ResourceManagerBase * > | interface_destruction_list_ |
| InterfaceManagerVector | interface_managers_ |
| InterfaceMap | interfaces_ |
| InterfaceMap | interfaces_combo_ |
| SizeMap | num_ifaces_registered_ |
| ResourceMap | resources_ |
Detailed Description
A hardware class for a Panda robot based on the ros_control framework.
This class is ready to be combined with other hardware classes e.g. to control multiple robots from a single controller. Note: This class allows for torque (effort) control only due to the lack of synchronization between master controllers of different robots. For more information see the documentation at https://frankaemika.github.io/docs/franka_ros.html .
Definition at line 30 of file franka_combinable_hw.h.
Constructor & Destructor Documentation
◆ FrankaCombinableHW()
| franka_hw::FrankaCombinableHW::FrankaCombinableHW | ( | ) |
Creates an instance of FrankaCombinableHW.
Definition at line 19 of file franka_combinable_hw.cpp.
Member Function Documentation
◆ checkForConflict()
|
overridevirtual |
Checks whether a requested controller can be run, based on the resources and interfaces it claims.
Note: FrankaCombinableHW allows torque control only.
- Parameters
-
[in] info Controllers to be running at the same time.
- Returns
- True in case of a conflict, false in case of valid controllers.
Reimplemented from franka_hw::FrankaHW.
Definition at line 173 of file franka_combinable_hw.cpp.
◆ connect()
|
overridevirtual |
Create a libfranka robot, connecting the hardware class to the master controller.
Note: While the robot is connected, no DESK based tasks can be executed.
Reimplemented from franka_hw::FrankaHW.
Definition at line 149 of file franka_combinable_hw.cpp.
◆ control()
|
overridevirtual |
Runs the currently active controller in a realtime loop.
If no controller is active, the function immediately exits.
- Parameters
-
[in] ros_callback A callback function that is executed at each time step.
- Exceptions
-
franka::ControlException if an error related to torque control occurred. franka::InvalidOperationException if a conflicting operation is already running. franka::NetworkException if the connection is lost, e.g. after a timeout. franka::RealtimeException if realtime priority cannot be set for the current thread.
Reimplemented from franka_hw::FrankaHW.
Definition at line 164 of file franka_combinable_hw.cpp.
◆ controllerNeedsReset()
|
noexcept |
Returns whether the controller needs to be reset e.g.
after error recovery.
- Returns
- A copy of the controller_needs_reset flag.
Definition at line 242 of file franka_combinable_hw.cpp.
◆ controlLoop()
|
private |
Definition at line 52 of file franka_combinable_hw.cpp.
◆ disconnect()
|
overridevirtual |
Tries to disconnect the hardware class from the robot, freeing it for e.g.
DESK-based tasks. Note: Disconnecting is only possible when no controller is actively running.
- Returns
- true if successfully disconnected, false otherwise.
Reimplemented from franka_hw::FrankaHW.
Definition at line 154 of file franka_combinable_hw.cpp.
◆ getArmID()
|
noexcept |
Getter method for the arm_id which is used to distinguish between multiple instances of FrankaCombinableHW.
- Returns
- A copy of the arm_id string identifying the class instance.
Definition at line 217 of file franka_combinable_hw.cpp.
◆ hasError()
|
noexcept |
Getter for the error flag of the class.
- Returns
- True in case of an error false otherwise.
Definition at line 226 of file franka_combinable_hw.cpp.
◆ init()
|
overridevirtual |
Initializes the FrankaHW class to be fully operational.
This involves parsing required configurations from the ROS parameter server, connecting to the robot and setting up interfaces for the ros_control framework.
- Parameters
-
[in] root_nh A node handle in the root namespace of the control node. [in] robot_hw_nh A node handle in the namespace of the robot hardware.
- Returns
- True if successful, false otherwise.
Reimplemented from franka_hw::FrankaHW.
Definition at line 21 of file franka_combinable_hw.cpp.
◆ initRobot()
|
overrideprivatevirtual |
Uses the robot_ip_ to connect to the robot via libfranka and loads the libfranka model.
Reimplemented from franka_hw::FrankaHW.
Definition at line 41 of file franka_combinable_hw.cpp.
◆ initROSInterfaces()
|
overridevirtual |
Initializes the class in terms of ros_control interfaces.
Note: You have to call initParameters beforehand. Use the complete initialization routine init() method to control robots.
- Parameters
-
[in] robot_hw_nh A node handle in the namespace of the robot hardware.
- Returns
- True if successful, false otherwise.
Reimplemented from franka_hw::FrankaHW.
Definition at line 26 of file franka_combinable_hw.cpp.
◆ libfrankaUpdateCallback()
|
inlineprivate |
Definition at line 148 of file franka_combinable_hw.h.
◆ publishErrorState()
|
private |
Definition at line 46 of file franka_combinable_hw.cpp.
◆ read()
|
overridevirtual |
Reads data from the franka robot.
- Parameters
-
[in] time The current time. Not used in this class. [in] period The time passed since the last call to read. Not used in this class.
Reimplemented from franka_hw::FrankaHW.
Definition at line 198 of file franka_combinable_hw.cpp.
◆ resetError()
| void franka_hw::FrankaCombinableHW::resetError | ( | ) |
Recovers the libfranka robot, resets the error flag and publishes the error state.
Definition at line 230 of file franka_combinable_hw.cpp.
◆ setRunFunction()
|
overrideprivatevirtual |
Configures the run function which is used as libfranka control callback based on the requested control mode.
- Parameters
-
[in] requested_control_mode The control mode to configure (e.g. torque/position/velocity etc.) [in] limit_rate Flag to enable/disable rate limiting to smoothen the commands. [in] cutoff_frequency The cutoff frequency applied for command smoothing. [in] internal_controller The internal controller to use when using position or velocity modes.
- Returns
- True if successful, false otherwise.
Reimplemented from franka_hw::FrankaHW.
Definition at line 246 of file franka_combinable_hw.cpp.
◆ setupServicesAndActionServers()
|
private |
Definition at line 108 of file franka_combinable_hw.cpp.
◆ triggerError()
| void franka_hw::FrankaCombinableHW::triggerError | ( | ) |
Triggers a stop of the controlLoop.
This interface is used to stop all combined robots together when at one robot encounters an error.
Definition at line 221 of file franka_combinable_hw.cpp.
◆ write()
|
overridevirtual |
Writes data to the franka robot.
- Parameters
-
[in] time The current time. Not used in this class. [in] period The time passed since the last call to write.
Reimplemented from franka_hw::FrankaHW.
Definition at line 203 of file franka_combinable_hw.cpp.
Member Data Documentation
◆ control_loop_thread_
|
private |
Definition at line 183 of file franka_combinable_hw.h.
◆ controller_needs_reset_
|
private |
Definition at line 190 of file franka_combinable_hw.h.
◆ error_recovered_
|
private |
Definition at line 189 of file franka_combinable_hw.h.
◆ has_error_
|
private |
Definition at line 187 of file franka_combinable_hw.h.
◆ has_error_pub_
|
private |
Definition at line 188 of file franka_combinable_hw.h.
◆ recovery_action_server_
|
private |
Definition at line 186 of file franka_combinable_hw.h.
◆ robot_hw_nh_
|
private |
Definition at line 191 of file franka_combinable_hw.h.
◆ services_
|
private |
Definition at line 184 of file franka_combinable_hw.h.
The documentation for this class was generated from the following files: