message_filters subscriber that can subscribe to various topic types and convert them all to an Azimuth message. More...
#include <message_filter.h>
Public Types | |
| typedef ros::MessageEvent< topic_tools::ShapeShifter const > | EventType |
Public Member Functions | |
| void | add (const EventType &event) |
| void | configFromParams (const cras::BoundParamHelper ¶ms) |
| Configure the subscriber from ROS parameters. More... | |
| template<typename F > | |
| void | connectInput (F &f) |
| const ros::Subscriber & | getSubscriber () const |
| Returns the internal ros::Subscriber. More... | |
| std::string | getTopic () const |
| Get the name of the subscribed topic. More... | |
| void | setInputDefaults (const cras::optional< decltype(compass_msgs::Azimuth::orientation)> &orientation, const cras::optional< decltype(compass_msgs::Azimuth::reference)> &reference, const cras::optional< decltype(compass_msgs::Azimuth::variance)> &variance) |
| Set defaults for inputs which do not support autodetection of various azimuth properties. More... | |
| void | subscribe () override |
| Re-subscribe to a topic. More... | |
| void | subscribe (ros::NodeHandle &nh, const std::string &topic, uint32_t queueSize, const ros::TransportHints &transportHints, ros::CallbackQueueInterface *callbackQueue) override |
| Subscribe to a topic. More... | |
| UniversalAzimuthSubscriber (const cras::LogHelperPtr &log, ros::NodeHandle &nh, const std::string &topic, uint32_t queueSize, const ros::TransportHints &transportHints={}, ros::CallbackQueueInterface *callbackQueue=nullptr) | |
| Constructor. More... | |
| void | unsubscribe () override |
| Unsubscribe from the topic. More... | |
| ~UniversalAzimuthSubscriber () override | |
 Public Member Functions inherited from cras::HasLogger Public Member Functions inherited from cras::HasLogger | |
| ::cras::LogHelperConstPtr | getCrasLogger () const |
| HasLogger (const ::cras::LogHelperPtr &log) | |
| void | setCrasLogger (const ::cras::LogHelperPtr &log) |
Protected Member Functions | |
| void | cb (const EventType &event) |
Protected Attributes | |
| CompassConverter | converter |
| The azimuth message converter. More... | |
| cras::optional< decltype(compass_msgs::Azimuth::orientation)> | inputOrientation |
| Orientation of the input azimuth (in case it is a data type which does not tell orientation explicitly). More... | |
| cras::optional< decltype(compass_msgs::Azimuth::reference)> | inputReference |
| Reference of the input azimuth (in case it is a data type which does not tell reference explicitly). More... | |
| cras::optional< decltype(compass_msgs::Azimuth::variance)> | inputVariance |
| Variance of the input azimuth (in case it is a data type which does not tell reference explicitly). More... | |
| ros::NodeHandle | nh |
| The nodehandle to use for subscribing,. More... | |
| ros::Subscriber | sub |
| The ROS subscriber. More... | |
| ros::SubscribeOptions | subscribeOps |
| Options for recreating the subscriber. More... | |
| Protected Attributes inherited from cras::HasLogger | |
| ::cras::LogHelperPtr | log |
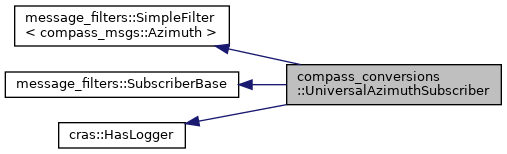
Detailed Description
message_filters subscriber that can subscribe to various topic types and convert them all to an Azimuth message.
Currently supported types are: compass_msgs::Azimuth, geometry_msgs::PoseWithCovarianceStamped, geometry_msgs::QuaternionStamped, sensor_msgs::Imu.
Definition at line 44 of file message_filter.h.
Member Typedef Documentation
◆ EventType
| typedef ros::MessageEvent<topic_tools::ShapeShifter const> compass_conversions::UniversalAzimuthSubscriber::EventType |
Definition at line 49 of file message_filter.h.
Constructor & Destructor Documentation
◆ UniversalAzimuthSubscriber()
| compass_conversions::UniversalAzimuthSubscriber::UniversalAzimuthSubscriber | ( | const cras::LogHelperPtr & | log, |
| ros::NodeHandle & | nh, | ||
| const std::string & | topic, | ||
| uint32_t | queueSize, | ||
| const ros::TransportHints & | transportHints = {}, |
||
| ros::CallbackQueueInterface * | callbackQueue = nullptr |
||
| ) |
Constructor.
- Parameters
-
log Logger. nh The ros::NodeHandle to use for subscribing. topic The topic to subscribe to. queueSize Queue size of the subscription. transportHints The transport hints to pass to the subscriber. callbackQueue The callback queue to attach to.
◆ ~UniversalAzimuthSubscriber()
|
override |
Member Function Documentation
◆ add()
| void compass_conversions::UniversalAzimuthSubscriber::add | ( | const EventType & | event | ) |
◆ cb()
|
protected |
◆ configFromParams()
| void compass_conversions::UniversalAzimuthSubscriber::configFromParams | ( | const cras::BoundParamHelper & | params | ) |
Configure the subscriber from ROS parameters.
- Parameters
-
[in] params ROS parameters.
Supported parameters:
~input_orientation(str, 'enu' or 'ned', default: unspecified): ENU or NED orientation to be used to interpret input messages (in case orientation cannot be derived either from message contents or topic name).~input_reference(str, 'magnetic', 'geographic' or 'UTM', default: no change): North reference to be used to interpret input messages (in case reference cannot be derived either from message contents or topic name).~input_variance(double, optional, rad^2): If specified, this variance will be used in the output messages if variance cannot be determined from the input messages (e.g. forQuaternionStamped).
◆ connectInput()
|
inline |
Definition at line 135 of file message_filter.h.
◆ getSubscriber()
| const ros::Subscriber& compass_conversions::UniversalAzimuthSubscriber::getSubscriber | ( | ) | const |
Returns the internal ros::Subscriber.
◆ getTopic()
| std::string compass_conversions::UniversalAzimuthSubscriber::getTopic | ( | ) | const |
Get the name of the subscribed topic.
- Returns
- The topic name.
◆ setInputDefaults()
| void compass_conversions::UniversalAzimuthSubscriber::setInputDefaults | ( | const cras::optional< decltype(compass_msgs::Azimuth::orientation)> & | orientation, |
| const cras::optional< decltype(compass_msgs::Azimuth::reference)> & | reference, | ||
| const cras::optional< decltype(compass_msgs::Azimuth::variance)> & | variance | ||
| ) |
Set defaults for inputs which do not support autodetection of various azimuth properties.
- Parameters
-
[in] orientation The default orientation used if it cannot be detected. [in] reference The reference used if it cannot be detected. [in] variance Default variance used for topics which cannot automatically discover it.
◆ subscribe() [1/2]
|
overridevirtual |
Re-subscribe to a topic.
Implements message_filters::SubscriberBase.
◆ subscribe() [2/2]
|
overridevirtual |
Subscribe to a topic.
If this Subscriber is already subscribed to a topic, this function will first unsubscribe.
- Parameters
-
nh The ros::NodeHandle to use for subscribing. topic The topic to subscribe to. queueSize Queue size of the subscription. transportHints The transport hints to pass to the subscriber. callbackQueue The callback queue to attach to.
Implements message_filters::SubscriberBase.
◆ unsubscribe()
|
overridevirtual |
Unsubscribe from the topic.
Implements message_filters::SubscriberBase.
Member Data Documentation
◆ converter
|
protected |
The azimuth message converter.
Definition at line 147 of file message_filter.h.
◆ inputOrientation
|
protected |
Orientation of the input azimuth (in case it is a data type which does not tell orientation explicitly).
Definition at line 150 of file message_filter.h.
◆ inputReference
|
protected |
Reference of the input azimuth (in case it is a data type which does not tell reference explicitly).
Definition at line 153 of file message_filter.h.
◆ inputVariance
|
protected |
Variance of the input azimuth (in case it is a data type which does not tell reference explicitly).
Definition at line 156 of file message_filter.h.
◆ nh
|
protected |
The nodehandle to use for subscribing,.
Definition at line 146 of file message_filter.h.
◆ sub
|
protected |
The ROS subscriber.
Definition at line 144 of file message_filter.h.
◆ subscribeOps
|
protected |
Options for recreating the subscriber.
Definition at line 145 of file message_filter.h.
The documentation for this class was generated from the following file: