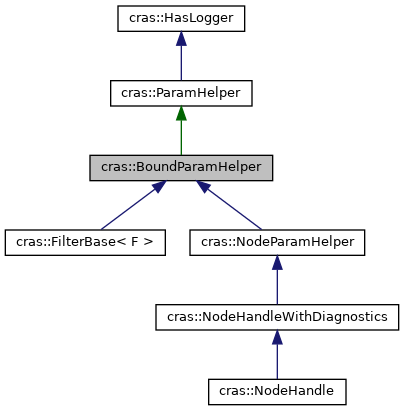
Bound param helper (allows omitting the param adapter in each getParam call). More...
#include <bound_param_helper.hpp>
Public Member Functions | |
| BoundParamHelper (const ::cras::LogHelperPtr &log, const ::cras::GetParamAdapterPtr ¶m) | |
| inline ::std::string | getNamespace () const |
| Return the namespace this helper operates in. More... | |
| inline ::std::string | getParam (const ::std::string &name, const ::cras::optional< const char * > &defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified). More... | |
| template<typename ResultType , typename ParamServerType = typename ::cras::DefaultParamServerType<ResultType>::type, ::cras::check_get_param_types< ResultType, ParamServerType > * = nullptr> | |
| ResultType | getParam (const ::std::string &name, const ::cras::optional< ResultType > &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified). More... | |
| inline ::std::string | getParam (const ::std::string &name, const char *defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions< std::string > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified). More... | |
| template<typename ResultType , typename ParamServerType = typename ::cras::DefaultParamServerType<ResultType>::type, ::cras::check_get_param_types< ResultType, ParamServerType > * = nullptr> | |
| ResultType | getParam (const ::std::string &name, const ResultType &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified). More... | |
| inline ::cras::GetParamResult<::std::string > | getParamVerbose (const ::std::string &name, const ::cras::optional< const char * > &defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified). More... | |
| template<typename ResultType , typename ParamServerType = typename ::cras::DefaultParamServerType<ResultType>::type, ::cras::check_get_param_types< ResultType, ParamServerType > * = nullptr> | |
| inline ::cras::GetParamResult< ResultType > | getParamVerbose (const ::std::string &name, const ::cras::optional< ResultType > &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified). More... | |
| inline ::cras::GetParamResult< std::string > | getParamVerbose (const ::std::string &name, const char *defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified). More... | |
| template<typename ResultType , typename ParamServerType = typename ::cras::DefaultParamServerType<ResultType>::type, ::cras::check_get_param_types< ResultType, ParamServerType > * = nullptr> | |
| inline ::cras::GetParamResult< ResultType > | getParamVerbose (const ::std::string &name, const ResultType &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified). More... | |
| bool | hasParam (const ::std::string &name, const bool searchNested=true) const |
| Whether a parameter with the given name exists. More... | |
| inline ::cras::BoundParamHelperPtr | paramsInNamespace (const ::std::string &ns) const |
| Return a parameter helper of a sub-namespace. More... | |
| ~BoundParamHelper () override=default | |
Protected Attributes | |
| ::cras::GetParamAdapterPtr | param |
| The bound parameter adapter. More... | |
 Protected Attributes inherited from cras::HasLogger Protected Attributes inherited from cras::HasLogger | |
| ::cras::LogHelperPtr | log |
| Log helper. More... | |
Additional Inherited Members | |
| Protected Member Functions inherited from cras::ParamHelper | |
| ::cras::LogHelperPtr | getLogger () const |
| Return the log helper used for logging. More... | |
| inline ::std::string | getParam (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const ::cras::optional< const char * > &defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified). More... | |
| template<typename ResultType , typename ParamServerType = typename ::cras::DefaultParamServerType<ResultType>::type, ::cras::check_get_param_types< ResultType, ParamServerType > * = nullptr> | |
| ResultType | getParam (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const ::cras::optional< ResultType > &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified). More... | |
| inline ::std::string | getParam (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const char *defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified). More... | |
| template<typename ResultType , typename ParamServerType = typename ::cras::DefaultParamServerType<ResultType>::type, ::cras::check_get_param_types< ResultType, ParamServerType > * = nullptr> | |
| ResultType | getParam (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const ResultType &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified). More... | |
| inline ::cras::GetParamResult<::std::string > | getParamVerbose (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const ::cras::optional< const char * > &defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified). More... | |
| template<typename ResultType , typename ParamServerType = typename ::cras::DefaultParamServerType<ResultType>::type, ::cras::check_get_param_types< ResultType, ParamServerType > * = nullptr> | |
| inline ::cras::GetParamResult< ResultType > | getParamVerbose (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const ::cras::optional< ResultType > &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified). More... | |
| inline ::cras::GetParamResult<::std::string > | getParamVerbose (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const char *defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified). More... | |
| template<typename ResultType , typename ParamServerType = typename ::cras::DefaultParamServerType<ResultType>::type, ::cras::check_get_param_types< ResultType, ParamServerType > * = nullptr> | |
| inline ::cras::GetParamResult< ResultType > | getParamVerbose (const ::cras::GetParamAdapter ¶m, const ::std::string &name, const ResultType &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) const |
| Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified). More... | |
| ParamHelper (const ::cras::LogHelperPtr &log) | |
| void | setLogger (const ::cras::LogHelperPtr &logger) |
| Set the log helper used for logging. More... | |
| virtual | ~ParamHelper ()=default |
| Protected Member Functions inherited from cras::HasLogger | |
| ::cras::LogHelperConstPtr | getCrasLogger () const |
This is the function picked up by CRAS_* logging macros. More... | |
| HasLogger (const ::cras::LogHelperPtr &log) | |
| Associate the logger with this interface. More... | |
| void | setCrasLogger (const ::cras::LogHelperPtr &log) |
| Set the logger to be used for logging. More... | |
Detailed Description
Bound param helper (allows omitting the param adapter in each getParam call).
Definition at line 30 of file bound_param_helper.hpp.
Constructor & Destructor Documentation
◆ BoundParamHelper()
|
inline |
Create the bound param helper.
- Parameters
-
log The log helper to use for logging parameter read messages. param The raw parameter adapter to bind to.
Definition at line 38 of file bound_param_helper.hpp.
◆ ~BoundParamHelper()
|
overridedefault |
Member Function Documentation
◆ getNamespace()
|
inline |
Return the namespace this helper operates in.
- Returns
- The namespace.
Definition at line 271 of file bound_param_helper.hpp.
◆ getParam() [1/4]
|
inline |
Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified).
This is a variant allowing use of C-string instead of std::string.
- Parameters
-
[in] name Name of the parameter. [in] defaultValue The default value to use. If std::nullopt, then the parameter is required. If a required param is not found, a GetParamException is thrown. [in] unit Optional string serving as a [physical/SI] unit of the parameter, just to make the messages more informative. [in] options Options specifying detailed behavior of this function. Use the braced initializer syntax for comfortable writing, e.g. {.throwIfConvertFails = true, .allowNestedParams = false}.
- Returns
- The loaded parameter value.
Definition at line 202 of file bound_param_helper.hpp.
◆ getParam() [2/4]
|
inline |
Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified).
- Template Parameters
-
ResultType Param type (the C++ type). It is converted from the intermediate ParamServerType using options.toResult function (which defaults to static_cast). ParamServerType Intermediate type to which the XmlRpcValue read from parameter server is converted. The conversion is done using options.toParam function (which defaults to cras::convert). Most overloads of cras::convert are in xmlrpc_value_utils.hpp, but you can add your own.
- Parameters
-
[in] name Name of the parameter. [in] defaultValue The default value to use. If std::nullopt, then the parameter is required. If a required param is not found, a GetParamException is thrown. [in] unit Optional string serving as a [physical/SI] unit of the parameter, just to make the messages more informative. [in] options Options specifying detailed behavior of this function. Use the braced initializer syntax for comfortable writing, e.g. {.throwIfConvertFails = true, .allowNestedParams = false}.
- Returns
- The loaded parameter value.
Definition at line 116 of file bound_param_helper.hpp.
◆ getParam() [3/4]
|
inline |
Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified).
This is a variant allowing use of C-string instead of std::string.
- Parameters
-
[in] name Name of the parameter. [in] defaultValue The default value to use. [in] unit Optional string serving as a [physical/SI] unit of the parameter, just to make the messages more informative. [in] options Options specifying detailed behavior of this function. Use the braced initializer syntax for comfortable writing, e.g. {.throwIfConvertFails = true, .allowNestedParams = false}.
- Returns
- The loaded parameter value.
Definition at line 221 of file bound_param_helper.hpp.
◆ getParam() [4/4]
|
inline |
Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified).
- Template Parameters
-
ResultType Param type (the C++ type). It is converted from the intermediate ParamServerType using options.toResult function (which defaults to static_cast). ParamServerType Intermediate type to which the XmlRpcValue read from parameter server is converted. The conversion is done using options.toParam function (which defaults to cras::convert). Most overloads of cras::convert are in xmlrpc_value_utils.hpp, but you can add your own.
- Parameters
-
[in] name Name of the parameter. [in] defaultValue The default value to use. [in] unit Optional string serving as a [physical/SI] unit of the parameter, just to make the messages more informative. [in] options Options specifying detailed behavior of this function. Use the braced initializer syntax for comfortable writing, e.g. {.throwIfConvertFails = true, .allowNestedParams = false}.
- Returns
- The loaded parameter value.
Definition at line 141 of file bound_param_helper.hpp.
◆ getParamVerbose() [1/4]
|
inline |
Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified).
This is a variant allowing use of C-string instead of std::string.
- Parameters
-
[in] name Name of the parameter. [in] defaultValue The default value to use. If std::nullopt, then the parameter is required. If a required param is not found, a GetParamException is thrown. [in] unit Optional string serving as a [physical/SI] unit of the parameter, just to make the messages more informative. [in] options Options specifying detailed behavior of this function. Use the braced initializer syntax for comfortable writing, e.g. {.throwIfConvertFails = true, .allowNestedParams = false}.
- Returns
- A wrapper containing the loaded parameter value and details about the function execution.
Definition at line 163 of file bound_param_helper.hpp.
◆ getParamVerbose() [2/4]
|
inline |
Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified).
- Template Parameters
-
ResultType Param type (the C++ type). It is converted from the intermediate ParamServerType using options.toResult function (which defaults to static_cast). ParamServerType Intermediate type to which the XmlRpcValue read from parameter server is converted. The conversion is done using options.toParam function (which defaults to cras::convert). Most overloads of cras::convert are in xmlrpc_value_utils.hpp, but you can add your own.
- Parameters
-
[in] name Name of the parameter. [in] defaultValue The default value to use. If std::nullopt, then the parameter is required. If a required param is not found, a GetParamException is thrown. [in] unit Optional string serving as a [physical/SI] unit of the parameter, just to make the messages more informative. [in] options Options specifying detailed behavior of this function. Use the braced initializer syntax for comfortable writing, e.g. {.throwIfConvertFails = true, .allowNestedParams = false}.
- Returns
- A wrapper containing the loaded parameter value and details about the function execution.
Definition at line 64 of file bound_param_helper.hpp.
◆ getParamVerbose() [3/4]
|
inline |
Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified).
This is a variant allowing use of C-string instead of std::string.
- Parameters
-
[in] name Name of the parameter. [in] defaultValue The default value to use. [in] unit Optional string serving as a [physical/SI] unit of the parameter, just to make the messages more informative. [in] options Options specifying detailed behavior of this function. Use the braced initializer syntax for comfortable writing, e.g. {.throwIfConvertFails = true, .allowNestedParams = false}.
- Returns
- A wrapper containing the loaded parameter value and details about the function execution.
Definition at line 182 of file bound_param_helper.hpp.
◆ getParamVerbose() [4/4]
|
inline |
Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified).
- Template Parameters
-
ResultType Param type (the C++ type). It is converted from the intermediate ParamServerType using options.toResult function (which defaults to static_cast). ParamServerType Intermediate type to which the XmlRpcValue read from parameter server is converted. The conversion is done using options.toParam function (which defaults to cras::convert). Most overloads of cras::convert are in xmlrpc_value_utils.hpp, but you can add your own.
- Parameters
-
[in] name Name of the parameter. [in] defaultValue The default value to use. [in] unit Optional string serving as a [physical/SI] unit of the parameter, just to make the messages more informative. [in] options Options specifying detailed behavior of this function. Use the braced initializer syntax for comfortable writing, e.g. {.throwIfConvertFails = true, .allowNestedParams = false}.
- Returns
- A wrapper containing the loaded parameter value and details about the function execution.
Definition at line 89 of file bound_param_helper.hpp.
◆ hasParam()
|
inline |
Whether a parameter with the given name exists.
- Parameters
-
[in] name Name of the parameter. [in] searchNested If true, nested parameters (containing slash) will be looked up recursively. Otherwise, exact name match is required and slashes in name will result in failure (returning false).
- Returns
- Whether the parameter exists.
Definition at line 235 of file bound_param_helper.hpp.
◆ paramsInNamespace()
|
inline |
Return a parameter helper of a sub-namespace.
- Parameters
-
[in] ns Namespace.
- Returns
- The new helper.
Definition at line 262 of file bound_param_helper.hpp.
Member Data Documentation
◆ param
|
protected |
The bound parameter adapter.
Definition at line 280 of file bound_param_helper.hpp.
The documentation for this class was generated from the following file: