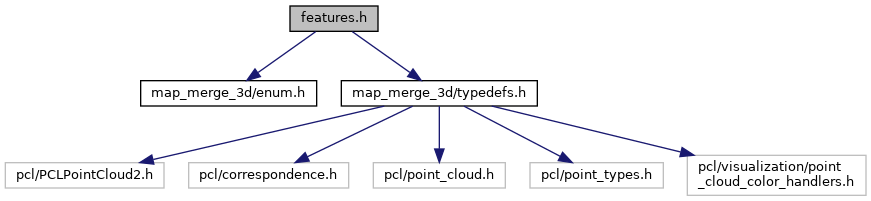
Include dependency graph for features.h:
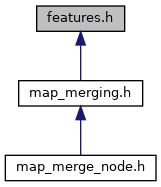
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| map_merge_3d | |
Functions | |
| LocalDescriptorsPtr | map_merge_3d::computeLocalDescriptors (const PointCloudConstPtr &points, const SurfaceNormalsPtr &normals, const PointCloudPtr &keypoints, Descriptor descriptor, double feature_radius) |
| Compute local feature descriptors around each keypoint. More... | |
| SurfaceNormalsPtr | map_merge_3d::computeSurfaceNormals (const PointCloudConstPtr &input, double radius) |
| Estimate cloud surface normals. More... | |
| PointCloudPtr | map_merge_3d::detectKeypoints (const PointCloudConstPtr &points, const SurfaceNormalsPtr &normals, Keypoint type, double threshold, double radius, double resolution) |
| Detects keypoints in the pointcloud. More... | |
| PointCloudPtr | map_merge_3d::downSample (const PointCloudConstPtr &input, double resolution) |
| Voxelize input pointcloud to reduce number of points. More... | |
| DOXYGEN_SKIP | map_merge_3d::ENUM_CLASS (Descriptor, DESCRIPTORS_NAMES_) |
| map_merge_3d::ENUM_CLASS (Keypoint, SIFT, HARRIS) | |
| PointCloudPtr | map_merge_3d::removeOutliers (const PointCloudConstPtr &input, double radius, int min_neighbours) |
| Removes outliers from the pointcloud. More... | |