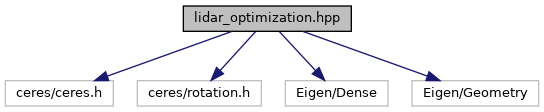
#include <ceres/ceres.h>#include <ceres/rotation.h>#include <Eigen/Dense>#include <Eigen/Geometry>
Include dependency graph for lidar_optimization.hpp:
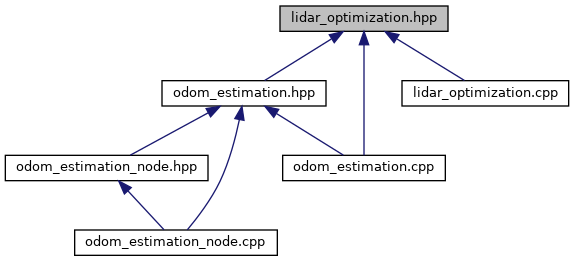
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | floam::lidar::LidarEdgeFunctor |
| class | floam::lidar::LidarSurfaceFunctor |
| class | floam::lidar::PoseSE3Parameterization |
Namespaces | |
| floam | |
| Major rewrite Author: Evan Flynn. | |
| floam::lidar | |
Functions | |
| void | floam::lidar::getTransformFromSe3 (const Eigen::Matrix< double, 6, 1 > &se3, Eigen::Quaterniond &q, Eigen::Vector3d &t) |
| Eigen::Matrix3d | floam::lidar::skew (Eigen::Vector3d &mat_in) |