Interface class for reference trajectories. More...
#include <reference_trajectory.h>
Public Types | |
| using | OutputVector = Eigen::VectorXd |
| using | Ptr = std::shared_ptr< ReferenceTrajectoryInterface > |
Public Member Functions | |
| virtual int | getDimension () const =0 |
| virtual Ptr | getInstance () const =0 |
| virtual const OutputVector & | getNextSteadyState (const Time &t)=0 |
| virtual void | getReference (const Time &t, OutputVector &ref) const =0 |
| virtual const OutputVector & | getReferenceCached (int k) const =0 |
| virtual bool | isCached (double dt, int n, Time t) const =0 |
| virtual bool | isCached (const std::vector< double > &dt, Time t) const =0 |
| virtual bool | isStatic () const =0 |
| virtual bool | isZero () const |
| virtual void | precompute (double dt, int n, Time t)=0 |
| virtual void | precompute (const std::vector< double > &dt, Time t)=0 |
| virtual | ~ReferenceTrajectoryInterface ()=default |
Static Public Member Functions | |
| static Factory< ReferenceTrajectoryInterface > & | getFactory () |
| Get access to the associated factory. More... | |
Detailed Description
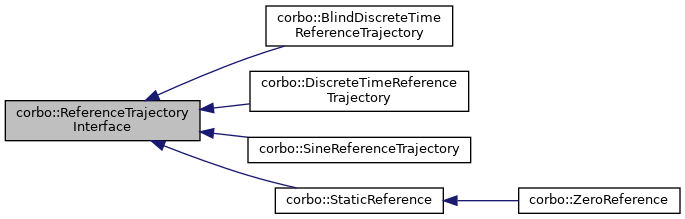
Interface class for reference trajectories.
This class represents a generic reference trajectory, e.g. for plant controllers. The interface does not distinguish between state and control input references, but is subject to an Eigen::VectorXd type of arbitrary dimension.
- Remarks
- This interface is provided with factory support (ReferenceTrajectoryFactory).
- See also
- StaticReference ZeroReference
- Todo:
- The interface is not yet completed/stable for non-static references, e.g. an appropriate pre-computation and time-shifting is not designed yet.
Definition at line 60 of file reference_trajectory.h.
Member Typedef Documentation
◆ OutputVector
| using corbo::ReferenceTrajectoryInterface::OutputVector = Eigen::VectorXd |
Definition at line 64 of file reference_trajectory.h.
◆ Ptr
| using corbo::ReferenceTrajectoryInterface::Ptr = std::shared_ptr<ReferenceTrajectoryInterface> |
Definition at line 63 of file reference_trajectory.h.
Constructor & Destructor Documentation
◆ ~ReferenceTrajectoryInterface()
|
virtualdefault |
Member Function Documentation
◆ getDimension()
|
pure virtual |
◆ getFactory()
|
inlinestatic |
Get access to the associated factory.
Definition at line 71 of file reference_trajectory.h.
◆ getInstance()
|
pure virtual |
◆ getNextSteadyState()
|
pure virtual |
◆ getReference()
|
pure virtual |
◆ getReferenceCached()
|
pure virtual |
◆ isCached() [1/2]
◆ isCached() [2/2]
|
pure virtual |
◆ isStatic()
|
pure virtual |
◆ isZero()
|
inlinevirtual |
Reimplemented in corbo::BlindDiscreteTimeReferenceTrajectory, corbo::DiscreteTimeReferenceTrajectory, corbo::SineReferenceTrajectory, corbo::ZeroReference, and corbo::StaticReference.
Definition at line 74 of file reference_trajectory.h.
◆ precompute() [1/2]
◆ precompute() [2/2]
|
pure virtual |
The documentation for this class was generated from the following file: