cartographer
cloud
internal
handlers
handlers Directory Reference
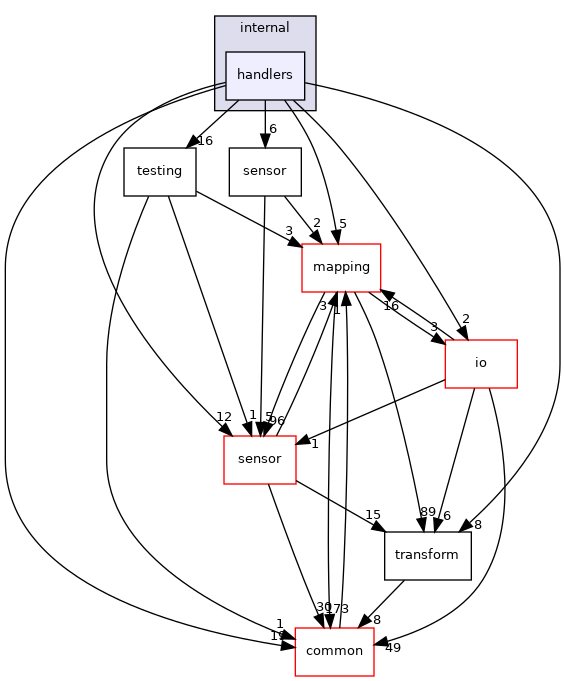
Directory dependency graph for handlers:
Files
file
add_fixed_frame_pose_data_handler.cc
[code]
file
add_fixed_frame_pose_data_handler.h
[code]
file
add_fixed_frame_pose_data_handler_test.cc
[code]
file
add_imu_data_handler.cc
[code]
file
add_imu_data_handler.h
[code]
file
add_imu_data_handler_test.cc
[code]
file
add_landmark_data_handler.cc
[code]
file
add_landmark_data_handler.h
[code]
file
add_landmark_data_handler_test.cc
[code]
file
add_odometry_data_handler.cc
[code]
file
add_odometry_data_handler.h
[code]
file
add_odometry_data_handler_test.cc
[code]
file
add_rangefinder_data_handler.cc
[code]
file
add_rangefinder_data_handler.h
[code]
file
add_rangefinder_data_handler_test.cc
[code]
file
add_sensor_data_batch_handler.cc
[code]
file
add_sensor_data_batch_handler.h
[code]
file
add_trajectory_handler.cc
[code]
file
add_trajectory_handler.h
[code]
file
add_trajectory_handler_test.cc
[code]
file
finish_trajectory_handler.cc
[code]
file
finish_trajectory_handler.h
[code]
file
get_all_submap_poses.cc
[code]
file
get_all_submap_poses.h
[code]
file
get_constraints_handler.cc
[code]
file
get_constraints_handler.h
[code]
file
get_landmark_poses_handler.cc
[code]
file
get_landmark_poses_handler.h
[code]
file
get_landmark_poses_handler_test.cc
[code]
file
get_local_to_global_transform_handler.cc
[code]
file
get_local_to_global_transform_handler.h
[code]
file
get_submap_handler.cc
[code]
file
get_submap_handler.h
[code]
file
get_trajectory_node_poses_handler.cc
[code]
file
get_trajectory_node_poses_handler.h
[code]
file
is_trajectory_finished_handler.cc
[code]
file
is_trajectory_finished_handler.h
[code]
file
is_trajectory_frozen_handler.cc
[code]
file
is_trajectory_frozen_handler.h
[code]
file
load_state_handler.cc
[code]
file
load_state_handler.h
[code]
file
receive_global_slam_optimizations_handler.cc
[code]
file
receive_global_slam_optimizations_handler.h
[code]
file
receive_local_slam_results_handler.cc
[code]
file
receive_local_slam_results_handler.h
[code]
file
run_final_optimization_handler.cc
[code]
file
run_final_optimization_handler.h
[code]
file
set_landmark_pose_handler.cc
[code]
file
set_landmark_pose_handler.h
[code]
file
set_landmark_pose_handler_test.cc
[code]
file
write_state_handler.cc
[code]
file
write_state_handler.h
[code]
cartographer
Author(s): The Cartographer Authors
autogenerated on Mon Feb 28 2022 22:00:59