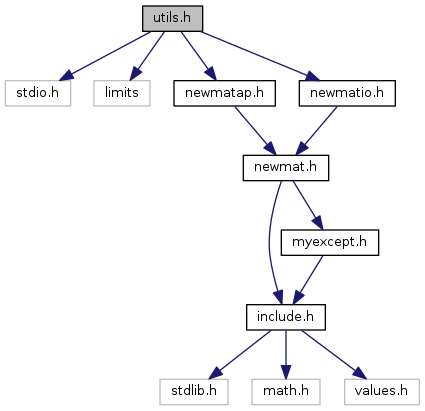
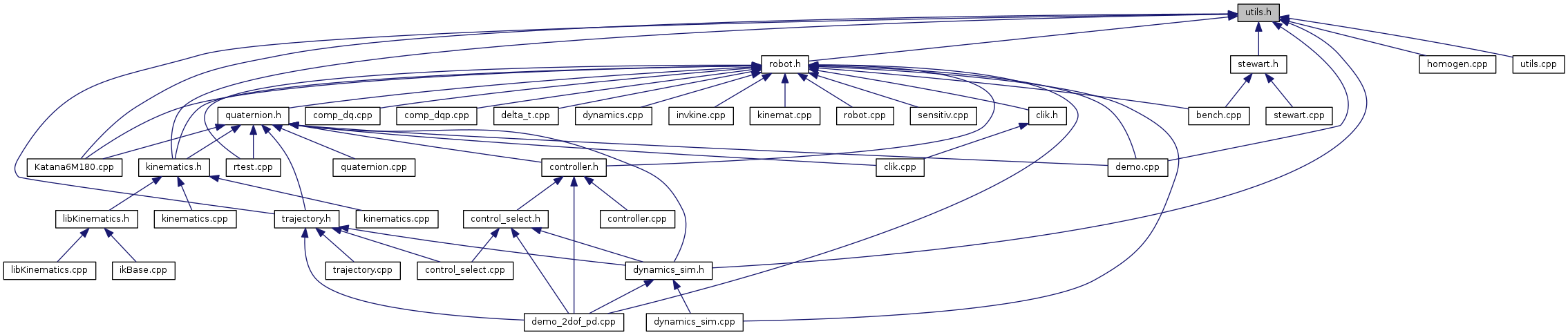
Utility header file. More...
Go to the source code of this file.
Macros | |
| #define | GRAVITY 9.81 |
| #define | M_PI 3.14159265358979 |
| #define | WANT_FSTREAM /* include.h will get fstream fns */ |
| #define | WANT_MATH /* include.h will get math fns */ |
| #define | WANT_STREAM /* include.h will get stream fns */ |
| #define | WANT_STRING /* include.h will get string fns */ |
Functions | |
| double | deg2rad (const double angle_deg) |
| ReturnMatrix | eulzxz (const ColumnVector &a) |
| Euler ZXZ rotation. More... | |
| ReturnMatrix | ieulzxz (const Matrix &R) |
| Obtain Roll, Pitch and Yaw from a rotation matrix. More... | |
| ReturnMatrix | Integ_Trap (const ColumnVector &present, ColumnVector &past, const Real dt) |
| Trapezoidal integration. More... | |
| ReturnMatrix | irotk (const Matrix &R) |
| Obtain axis from a rotation matrix. More... | |
| ReturnMatrix | irpy (const Matrix &R) |
| Obtain Roll, Pitch and Yaw from a rotation matrix. More... | |
| bool | isZero (const double x) |
| void | odeint (ReturnMatrix(*xdot)(Real time, const Matrix &xin), Matrix &xo, Real to, Real tf, Real eps, Real h1, Real hmin, int &nok, int &nbad, RowVector &tout, Matrix &xout, Real dtsav) |
| Integrate the ordinary differential equation xdot from time to to time tf using an adaptive step size strategy. More... | |
| ReturnMatrix | pinv (const Matrix &M) |
| Matrix pseudo inverse using SVD. More... | |
| double | rad2deg (const double angle_rad) |
| ReturnMatrix | rotd (const Real theta, const ColumnVector &k1, const ColumnVector &k2) |
| Rotation around an arbitrary line. More... | |
| ReturnMatrix | rotk (const Real theta, const ColumnVector &k) |
| Rotation around arbitrary axis. More... | |
| ReturnMatrix | rotx (const Real alpha) |
| Rotation around x axis. More... | |
| ReturnMatrix | roty (const Real beta) |
| Rotation around x axis. More... | |
| ReturnMatrix | rotz (const Real gamma) |
| Rotation around z axis. More... | |
| ReturnMatrix | rpy (const ColumnVector &a) |
| Roll Pitch Yaw rotation. More... | |
| void | Runge_Kutta4 (ReturnMatrix(*xdot)(Real time, const Matrix &xin), const Matrix &xo, Real to, Real tf, int nsteps, RowVector &tout, Matrix &xout) |
| Fixed step size fourth-order Runge-Kutta integrator. More... | |
| void | Runge_Kutta4_Real_time (ReturnMatrix(*xdot)(Real time, const Matrix &xin), const Matrix &xo, Real to, Real tf, int nsteps) |
| void | Runge_Kutta4_Real_time (ReturnMatrix(*xdot)(Real time, const Matrix &xin, bool &exit, bool &init), const Matrix &xo, Real to, Real tf, int nsteps) |
| Fixed step size fourth-order Runge-Kutta integrator. More... | |
| ReturnMatrix | sign (const Matrix &x) |
| Sign of a matrix. More... | |
| short | sign (const Real x) |
| Sign of real. More... | |
| ReturnMatrix | trans (const ColumnVector &a) |
| Translation. More... | |
| ReturnMatrix | x_prod_matrix (const ColumnVector &x) |
| Cross product matrix. More... | |
Variables | |
| const double | epsilon = 0.0000001 |
| Real | fourbyfourident [] |
Used to initialize a  matrix. More... matrix. More... | |
| static const char | header_utils_rcsid [] = "$Id: utils.h,v 1.10 2006/05/16 16:11:15 gourdeau Exp $" |
| RCS/CVS version. More... | |
| Real | threebythreeident [] |
Used to initialize a  matrix. More... matrix. More... | |
Detailed Description
Utility header file.
Definition in file utils.h.
Macro Definition Documentation
Function Documentation
| ReturnMatrix eulzxz | ( | const ColumnVector & | a | ) |
Euler ZXZ rotation.
Definition at line 211 of file homogen.cpp.
| ReturnMatrix ieulzxz | ( | const Matrix & | R | ) |
Obtain Roll, Pitch and Yaw from a rotation matrix.
Definition at line 294 of file homogen.cpp.
| ReturnMatrix Integ_Trap | ( | const ColumnVector & | present, |
| ColumnVector & | past, | ||
| const Real | dt | ||
| ) |
| ReturnMatrix irotk | ( | const Matrix & | R | ) |
Obtain axis from a rotation matrix.
Definition at line 253 of file homogen.cpp.
| ReturnMatrix irpy | ( | const Matrix & | R | ) |
Obtain Roll, Pitch and Yaw from a rotation matrix.
Definition at line 271 of file homogen.cpp.
| void odeint | ( | ReturnMatrix(*)(Real time, const Matrix &xin) | xdot, |
| Matrix & | xo, | ||
| Real | to, | ||
| Real | tf, | ||
| Real | eps, | ||
| Real | h1, | ||
| Real | hmin, | ||
| int & | nok, | ||
| int & | nbad, | ||
| RowVector & | tout, | ||
| Matrix & | xout, | ||
| Real | dtsav | ||
| ) |
Integrate the ordinary differential equation xdot from time to to time tf using an adaptive step size strategy.
adapted from: Numerical Recipes in C, The Art of Scientific Computing, Press, William H. and Flannery, Brian P. and Teukolsky, Saul A. and Vetterling, William T., Cambridge University Press, 1988.
| ReturnMatrix pinv | ( | const Matrix & | M | ) |
 is a singular value decomposition of A, then
is a singular value decomposition of A, then  where
where  is the conjugate transpose of
is the conjugate transpose of  and
and ![$ Q^{\dagger} = \left [ \begin{array}{cccc} 1/\sigma_1 & & & \\ & 1/\sigma_2& & \\ & & \ddots & \\ & & & 0 \end{array} \right ]$](form_346.png) where the
where the  are replaced by 0 when
are replaced by 0 when 
| ReturnMatrix rotd | ( | const Real | theta, |
| const ColumnVector & | k1, | ||
| const ColumnVector & | k2 | ||
| ) |
Rotation around an arbitrary line.
Definition at line 240 of file homogen.cpp.
| ReturnMatrix rotk | ( | const Real | theta, |
| const ColumnVector & | k | ||
| ) |
Rotation around arbitrary axis.
Definition at line 149 of file homogen.cpp.
| ReturnMatrix rotx | ( | const Real | alpha | ) |
Rotation around x axis.
Definition at line 87 of file homogen.cpp.
| ReturnMatrix roty | ( | const Real | beta | ) |
Rotation around x axis.
Definition at line 107 of file homogen.cpp.
| ReturnMatrix rotz | ( | const Real | gamma | ) |
Rotation around z axis.
Definition at line 127 of file homogen.cpp.
| ReturnMatrix rpy | ( | const ColumnVector & | a | ) |
Roll Pitch Yaw rotation.
Definition at line 182 of file homogen.cpp.
| void Runge_Kutta4_Real_time | ( | ReturnMatrix(*)(Real time, const Matrix &xin) | xdot, |
| const Matrix & | xo, | ||
| Real | to, | ||
| Real | tf, | ||
| int | nsteps | ||
| ) |
| ReturnMatrix sign | ( | const Matrix & | x | ) |
| ReturnMatrix trans | ( | const ColumnVector & | a | ) |
Translation.
Definition at line 68 of file homogen.cpp.
| ReturnMatrix x_prod_matrix | ( | const ColumnVector & | x | ) |
Variable Documentation
|
static |