A demo file. More...
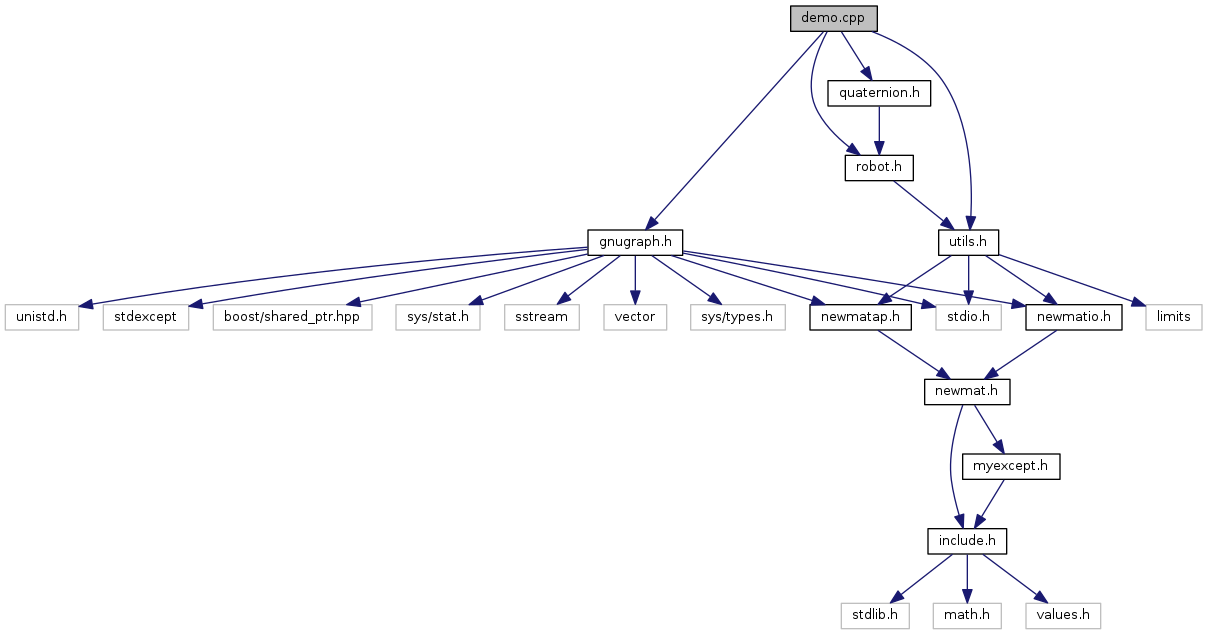
Include dependency graph for demo.cpp:
Go to the source code of this file.
Functions | |
| void | dynamics_demo (void) |
| void | homogen_demo (void) |
| void | kinematics_demo (void) |
| int | main (void) |
| ReturnMatrix | xdot (Real t, const Matrix &x) |
Variables | |
| Matrix | K |
| const Real | PUMA560_data [] |
| const Real | PUMA560_motor [] |
| ColumnVector | q0 |
| static const char | rcsid [] = "$Id: demo.cpp,v 1.34 2006/05/16 16:27:43 gourdeau Exp $" |
| RCS/CVS version. More... | |
| Robot | robot |
| const Real | RP_data [] |
| const Real | RR_data [] |
| const Real | RR_data_mdh [] |
| const Real | RR_data_mdh_min_para [] |
| const Real | STANFORD_data [] |
Detailed Description
Function Documentation
| ReturnMatrix xdot | ( | Real | t, |
| const Matrix & | x | ||
| ) |
Variable Documentation
| const Real PUMA560_data[] |
Initial value:
=
{0, 0, 0, 0, M_PI/2.0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.35, 0, 0, 0,
0, 0, 0, 0.4318, 0, 0, 0, 0, 17.4, -0.3638, 0.006, 0.2275, 0.13, 0, 0, 0.524, 0, 0.539, 0,
0, 0, 0.15005, 0.0203, -M_PI/2.0, 0, 0, 0, 4.8, -0.0203, -0.0141, 0.07, 0.066, 0, 0, 0.086, 0, 0.0125, 0,
0, 0, 0.4318, 0.0, M_PI/2.0, 0, 0, 0, 0.82, 0, 0.019, 0, 0.0018, 0, 0, 0.0013, 0, 0.0018, 0,
0, 0, 0, 0.0, -M_PI/2.0, 0, 0, 0, 0.34, 0.0, 0.0, 0.0, 0.0003, 0.0, 0.0, 0.0004, 0.0, 0.0003, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0.09, 0.0, 0.0, 0.032, 0.00015, 0.0, 0.0, 0.00015, 0.0, 0.00004, 0}
| const Real PUMA560_motor[] |
Initial value:
=
{200e-6, -62.6111, 1.48e-3, (.395 +.435)/2,
200e-6, 107.815, .817e-3, (.126 + .071)/2,
200e-6, -53.7063, 1.38e-3, (.132 + .105)/2,
33e-6, 76.0364, 71.2e-6, (11.2e-3 + 16.9e-3)/2,
33e-6, 71.923, 82.6e-6, (9.26e-3 + 14.5e-3)/2,
33e-6, 76.686, 36.7e-6, (3.96e-3 + 10.5e-3)/2}
| ColumnVector q0 |
|
static |
| const Real RP_data[] |
Initial value:
=
{0, 0, 0, 0, -M_PI/2.0, 0, 0, 0, 2.0, 0, 0, 0.0, 1.0, 0, 0, 1.0, 0, 1.0, 0, 0, 0, 0, 0,
1, 0, 0, 0, 0, 0, 0, 0, 1.0, 0, 0,-1.0, 0.0833333, 0, 0, 0.0833333, 0, 0.0833333, 0, 0, 0, 0, 0}
| const Real RR_data[] |
| const Real RR_data_mdh[] |
| const Real RR_data_mdh_min_para[] |
| const Real STANFORD_data[] |
Initial value:
=
{0.0, 0.0, 0.4120, 0.0, -M_PI/2, 0,0,0,9.29, 0.0, 0.0175, -0.1105, 0.276, 0.0, 0, 0.255, 0.0, 0.071,0,0,0,0,0,
0.0, 0.0, 0.1540, 0.0, M_PI/2.0, 0,0,0,5.01, 0.0, -1.054, 0.0, 0.108, 0.0, 0.0, 0.018, 0.0, 0.1,0,0,0,0,0,
1.0, -M_PI/2.0, 0.0, 0.0, 0.0, 0,0,0,4.25, 0.0, 0.0, -6.447, 2.51, 0.0, 0.0, 2.51, 0.0, 0.006,0,0,0,0,0,
0.0, 0.0, 0.0, 0.0, -M_PI/2.0, 0,0,0,1.08, 0.0, 0.092, -0.054, 0.002, 0.0, 0.0, 0.001, 0.0, 0.001,0,0,0,0,0,
0.0, 0.0, 0.0, 0.0, M_PI/2.0, 0,0,0,0.63, 0.0, 0.0, 0.566, 0.003, 0.0, 0.0, 0.003, 0.0, 0.0004,0,0,0,0,0,
0.0, 0.0, 0.2630, 0.0, 0.0, 0,0,0,0.51, 0.0, 0.0, 1.5540, 0.013, 0.0, 0.0, 0.013, 0.0, 0.0003,0,0,0,0,0}